YOLOV8改进:如何增加注意力模块?(以CBAM模块为例)
- 前言
- YOLOV8
- nn文件夹
- modules.py
- task.py
- models文件夹
- 总结
前言
因为毕设用到了YOLO,鉴于最近V8刚出,因此考虑将注意力机制加入到v8中。
YOLOV8
代码地址:YOLOV8官方代码
使用pip安装或者clone到本地,在此不多赘述了。下面以使用pip安装ultralytics包为例介绍。
进入ultralytics文件夹
nn文件夹
再进入nn文件夹。
-- modules.py:在里面存放着各种常用的模块,如:Conv,DWConv,ConvTranspose,TransformerLayer,Bottleneck等
-- tasks.py: 在里面导入了modules中的基本模块组建model,根据不同的下游任务组建不同的model。
modules.py
在该文件中,我们可以写入自己的注意力模块,或者使用V8已经提供的CBAM模块(见代码的CBAM类)
"""
通道注意力模型: 通道维度不变,压缩空间维度。该模块关注输入图片中有意义的信息。
1)假设输入的数据大小是(b,c,w,h)
2)通过自适应平均池化使得输出的大小变为(b,c,1,1)
3)通过2d卷积和sigmod激活函数后,大小是(b,c,1,1)
4)将上一步输出的结果和输入的数据相乘,输出数据大小是(b,c,w,h)。
"""
class ChannelAttention(nn.Module):
# Channel-attention module https://github.com/open-mmlab/mmdetection/tree/v3.0.0rc1/configs/rtmdet
def __init__(self, channels: int) -> None:
super().__init__()
self.pool = nn.AdaptiveAvgPool2d(1)
self.fc = nn.Conv2d(channels, channels, 1, 1, 0, bias=True)
self.act = nn.Sigmoid()
def forward(self, x: torch.Tensor) -> torch.Tensor:
return x * self.act(self.fc(self.pool(x)))
"""
空间注意力模块:空间维度不变,压缩通道维度。该模块关注的是目标的位置信息。
1) 假设输入的数据x是(b,c,w,h),并进行两路处理。
2)其中一路在通道维度上进行求平均值,得到的大小是(b,1,w,h);另外一路也在通道维度上进行求最大值,得到的大小是(b,1,w,h)。
3) 然后对上述步骤的两路输出进行连接,输出的大小是(b,2,w,h)
4)经过一个二维卷积网络,把输出通道变为1,输出大小是(b,1,w,h)
4)将上一步输出的结果和输入的数据x相乘,最终输出数据大小是(b,c,w,h)。
"""
class SpatialAttention(nn.Module):
# Spatial-attention module
def __init__(self, kernel_size=7):
super().__init__()
assert kernel_size in (3, 7), 'kernel size must be 3 or 7'
padding = 3 if kernel_size == 7 else 1
self.cv1 = nn.Conv2d(2, 1, kernel_size, padding=padding, bias=False)
self.act = nn.Sigmoid()
def forward(self, x):
return x * self.act(self.cv1(torch.cat([torch.mean(x, 1, keepdim=True), torch.max(x, 1, keepdim=True)[0]], 1)))
class CBAM(nn.Module):
# Convolutional Block Attention Module
def __init__(self, c1, kernel_size=7): # ch_in, kernels
super().__init__()
self.channel_attention = ChannelAttention(c1)
self.spatial_attention = SpatialAttention(kernel_size)
def forward(self, x):
return self.spatial_attention(self.channel_attention(x))
如果使用V8的CBAM模块,则不需要更改modules.py的内容。如果使用自己的注意力模块,只需要在该文件后面添加对应的代码即可。
task.py
在该文件中,通过import modules.py文件中的模块来构建模型。
在文件开头导入需要的模块,可以看到modules中的很多模块在v8中并没有用到。我们在最后添加对应的CBAM模块。
from ultralytics.nn.modules import (C1, C2, C3, C3TR, SPP, SPPF, Bottleneck, BottleneckCSP, C2f, C3Ghost, C3x, Classify,
Concat, Conv, ConvTranspose, Detect, DWConv, DWConvTranspose2d, Ensemble, Focus,
GhostBottleneck, GhostConv, Segment, CBAM)
之后修改对应的parse_model方法(对应428行)
添加分支elif m is CBAM:,具体代码如下:
def parse_model(d, ch, verbose=True): # model_dict, input_channels(3)
# Parse a YOLO model.yaml dictionary
if verbose:
LOGGER.info(f"\n{'':>3}{'from':>20}{'n':>3}{'params':>10} {'module':<45}{'arguments':<30}")
nc, gd, gw, act = d['nc'], d['depth_multiple'], d['width_multiple'], d.get('activation')
if act:
Conv.default_act = eval(act) # redefine default activation, i.e. Conv.default_act = nn.SiLU()
if verbose:
LOGGER.info(f"{colorstr('activation:')} {act}") # print
ch = [ch]
layers, save, c2 = [], [], ch[-1] # layers, savelist, ch out
for i, (f, n, m, args) in enumerate(d['backbone'] + d['head']): # from, number, module, args
m = eval(m) if isinstance(m, str) else m # eval strings
for j, a in enumerate(args):
# TODO: re-implement with eval() removal if possible
# args[j] = (locals()[a] if a in locals() else ast.literal_eval(a)) if isinstance(a, str) else a
with contextlib.suppress(NameError):
args[j] = eval(a) if isinstance(a, str) else a # eval strings
n = n_ = max(round(n * gd), 1) if n > 1 else n # depth gain
if m in (Classify, Conv, ConvTranspose, GhostConv, Bottleneck, GhostBottleneck, SPP, SPPF, DWConv, Focus,
BottleneckCSP, C1, C2, C2f, C3, C3TR, C3Ghost, nn.ConvTranspose2d, DWConvTranspose2d, C3x):
c1, c2 = ch[f], args[0]
if c2 != nc: # if c2 not equal to number of classes (i.e. for Classify() output)
c2 = make_divisible(c2 * gw, 8)
args = [c1, c2, *args[1:]]
if m in (BottleneckCSP, C1, C2, C2f, C3, C3TR, C3Ghost, C3x):
args.insert(2, n) # number of repeats
n = 1
elif m is nn.BatchNorm2d:
args = [ch[f]]
elif m is Concat:
c2 = sum(ch[x] for x in f)
elif m in (Detect, Segment):
args.append([ch[x] for x in f])
if m is Segment:
args[2] = make_divisible(args[2] * gw, 8)
elif m is CBAM:
"""
ch[f]:上一层的
args[0]:第0个参数
c1:输入通道数
c2:输出通道数
"""
c1, c2 = ch[f], args[0]
# print("ch[f]:",ch[f])
# print("args[0]:",args[0])
# print("args:",args)
# print("c1:",c1)
# print("c2:",c2)
if c2 != nc: # if c2 not equal to number of classes (i.e. for Classify() output)
c2 = make_divisible(c2 * gw, 8)
args = [c1,*args[1:]]
else:
c2 = ch[f]
m_ = nn.Sequential(*(m(*args) for _ in range(n))) if n > 1 else m(*args) # module
t = str(m)[8:-2].replace('__main__.', '') # module type
m.np = sum(x.numel() for x in m_.parameters()) # number params
m_.i, m_.f, m_.type = i, f, t # attach index, 'from' index, type
if verbose:
LOGGER.info(f'{i:>3}{str(f):>20}{n_:>3}{m.np:10.0f} {t:<45}{str(args):<30}') # print
save.extend(x % i for x in ([f] if isinstance(f, int) else f) if x != -1) # append to savelist
layers.append(m_)
if i == 0:
ch = []
ch.append(c2)
return nn.Sequential(*layers), sorted(save)
注意传入的参数为上一层输出,要注意CBAM模块的参数和传入参数的对应。读者可以自行print比较。
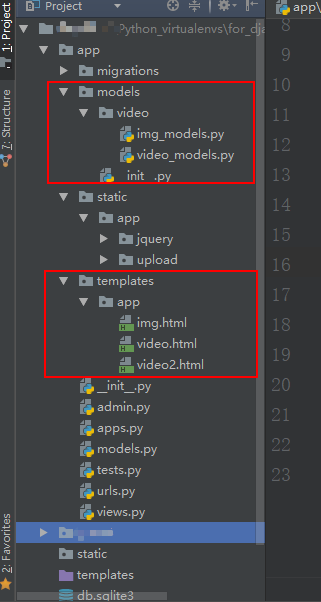
models文件夹
返回上一级目录,进入models文件夹。
可以看到该文件夹中还有v5、v3对应的模型配置文件,所以也可以使用该包进行v5和v3的训练。
 进入v8文件夹
进入v8文件夹

打开对应的yolov8.yaml,如下所示。该文件是V8对应的配置文件,里面包括了类别数,模型大小(n,s,m,l,x),backbone和head。
# Ultralytics YOLO 🚀, GPL-3.0 license
# YOLOv8 object detection model with P3-P5 outputs. For Usage examples see https://docs.ultralytics.com/tasks/detect
# Parameters
nc: 80 # number of classes
scales: # model compound scaling constants, i.e. 'model=yolov8n.yaml' will call yolov8.yaml with scale 'n'
# [depth, width, max_channels]
n: [0.33, 0.25, 1024] # YOLOv8n summary: 225 layers, 3157200 parameters, 3157184 gradients, 8.9 GFLOPs
s: [0.33, 0.50, 1024] # YOLOv8s summary: 225 layers, 11166560 parameters, 11166544 gradients, 28.8 GFLOPs
m: [0.67, 0.75, 768] # YOLOv8m summary: 295 layers, 25902640 parameters, 25902624 gradients, 79.3 GFLOPs
l: [1.00, 1.00, 512] # YOLOv8l summary: 365 layers, 43691520 parameters, 43691504 gradients, 165.7 GFLOPs
x: [1.00, 1.25, 512] # YOLOv8x summary: 365 layers, 68229648 parameters, 68229632 gradients, 258.5 GFLOPs
# YOLOv8.0n backbone
backbone:
# [from, repeats, module, args]
- [-1, 1, Conv, [64, 3, 2]] # 0-P1/2
- [-1, 1, Conv, [128, 3, 2]] # 1-P2/4
- [-1, 3, C2f, [128, True]]
- [-1, 1, Conv, [256, 3, 2]] # 3-P3/8
- [-1, 6, C2f, [256, True]]
- [-1, 1, Conv, [512, 3, 2]] # 5-P4/16
- [-1, 6, C2f, [512, True]]
- [-1, 1, Conv, [1024, 3, 2]] # 7-P5/32
- [-1, 3, C2f, [1024, True]]
- [-1, 1, SPPF, [1024, 5]] # 9
# YOLOv8.0n head
head:
- [-1, 1, nn.Upsample, [None, 2, 'nearest']]
- [[-1, 6], 1, Concat, [1]] # cat backbone P4
- [-1, 3, C2f, [512]] # 12
- [-1, 1, nn.Upsample, [None, 2, 'nearest']]
- [[-1, 4], 1, Concat, [1]] # cat backbone P3
- [-1, 3, C2f, [256]] # 15 (P3/8-small)
- [-1, 1, Conv, [256, 3, 2]]
- [[-1, 12], 1, Concat, [1]] # cat head P4
- [-1, 3, C2f, [512]] # 18 (P4/16-medium)
- [-1, 1, Conv, [512, 3, 2]]
- [[-1, 9], 1, Concat, [1]] # cat head P5
- [-1, 3, C2f, [1024]] # 21 (P5/32-large)
- [[15, 18, 21], 1, Detect, [nc]] # Detect(P3, P4, P5)
我们复制一份,以yolov8x为例,并改名为myyolo.yaml
# Ultralytics YOLO 🚀, GPL-3.0 license
# Parameters
nc: 80 # number of classes
depth_multiple: 1.00 # scales module repeats
width_multiple: 1.25 # scales convolution channels
# YOLOv8.0x backbone
backbone:
# [from, repeats, module, args]
- [-1, 1, Conv, [64, 3, 2]] # 0-P1/2
- [-1, 1, Conv, [128, 3, 2]] # 1-P2/4
- [-1, 3, C2f, [128, True]]
- [-1, 3, CBAM, [128,7]]
- [-1, 1, Conv, [256, 3, 2]] # 3-P3/8
- [-1, 6, C2f, [256, True]]
- [-1, 1, Conv, [512, 3, 2]] # 5-P4/16
- [-1, 6, C2f, [512, True]]
- [-1, 1, Conv, [512, 3, 2]] # 7-P5/32
- [-1, 3, C2f, [512, True]]
- [-1, 1, SPPF, [512, 5]] # 9
- [-1, 3, CBAM, [512,7]]
# YOLOv8.0x head
head:
- [-1, 1, nn.Upsample, [None, 2, 'nearest']]
- [[-1, 6], 1, Concat, [1]] # cat backbone P4
- [-1, 3, C2f, [512]] # 12
- [-1, 1, nn.Upsample, [None, 2, 'nearest']]
- [[-1, 4], 1, Concat, [1]] # cat backbone P3
- [-1, 3, C2f, [256]] # 15 (P3/8-small)
- [-1, 1, Conv, [256, 3, 2]]
- [[-1, 12], 1, Concat, [1]] # cat head P4
- [-1, 3, C2f, [512]] # 18 (P4/16-medium)
- [-1, 1, Conv, [512, 3, 2]]
- [[-1, 9], 1, Concat, [1]] # cat head P5
- [-1, 3, C2f, [512]] # 21 (P5/32-large)
- [[15, 18, 21], 1, Detect, [nc]] # Detect(P3, P4, P5)
我们在SPPF模块后添加一层CBAM模块,参数为[512,7],7为SpatialAttention对应的卷积核大小,值可为3或7,其他会报错。
添加完后使用对应的yaml配置文件训练即可。
yolo task=detect mode=train model=myyolo.yaml data=datasets/data/MOT20Det/VOC2007/mot20.yaml batch=32 epochs=80 imgsz=640 workers=16 device=\'0,1,2,3\'
值得注意的是,如果添加了多层CBAM模块,可能会导致各个模块对应的层数改变,因此需要同时修改head中各个layer from对应的层数。
初始YOLOV8X默认的层数如下
# 默认
# 0 -1 1 2320 ultralytics.nn.modules.Conv [3, 80, 3, 2]
# 1 -1 1 115520 ultralytics.nn.modules.Conv [80, 160, 3, 2]
# 2 -1 3 436800 ultralytics.nn.modules.C2f [160, 160, 3, True]
# 3 -1 1 461440 ultralytics.nn.modules.Conv [160, 320, 3, 2]
# 4 -1 6 3281920 ultralytics.nn.modules.C2f [320, 320, 6, True]
# 5 -1 1 1844480 ultralytics.nn.modules.Conv [320, 640, 3, 2]
# 6 -1 6 13117440 ultralytics.nn.modules.C2f [640, 640, 6, True]
# 7 -1 1 3687680 ultralytics.nn.modules.Conv [640, 640, 3, 2]
# 8 -1 3 6969600 ultralytics.nn.modules.C2f [640, 640, 3, True]
# 9 -1 1 1025920 ultralytics.nn.modules.SPPF [640, 640, 5]
# 10 -1 1 0 torch.nn.modules.upsampling.Upsample [None, 2, 'nearest']
# 11 [-1, 6] 1 0 ultralytics.nn.modules.Concat [1]
# 12 -1 3 7379200 ultralytics.nn.modules.C2f [1280, 640, 3]
# 13 -1 1 0 torch.nn.modules.upsampling.Upsample [None, 2, 'nearest']
# 14 [-1, 4] 1 0 ultralytics.nn.modules.Concat [1]
# 15 -1 3 1948800 ultralytics.nn.modules.C2f [960, 320, 3]
# 16 -1 1 922240 ultralytics.nn.modules.Conv [320, 320, 3, 2]
# 17 [-1, 12] 1 0 ultralytics.nn.modules.Concat [1]
# 18 -1 3 7174400 ultralytics.nn.modules.C2f [960, 640, 3]
# 19 -1 1 3687680 ultralytics.nn.modules.Conv [640, 640, 3, 2]
# 20 [-1, 9] 1 0 ultralytics.nn.modules.Concat [1]
# 21 -1 3 7379200 ultralytics.nn.modules.C2f [1280, 640, 3]
# 22 [15, 18, 21] 1 8795008 ultralytics.nn.modules.Detect [80, [320, 640, 640]]
增加对应的模块后,之后的层数的layer+1,因此需要适当更改,不然会报concat维度不匹配的错误,如下
RuntimeError: Sizes of tensors must match except in dimension 1. Expected size 16 but got size 32 for tensor number 1 in the list.
总结
添加注意力模块只需要3步
1、在对应的modules.py中添加需要的模块
2、在task.py中引入modules.py中的模块,并进行适当的参数匹配
3、修改对应的models文件夹中的yaml文件,并注意层数问题。
之后就可以进行正常训练了

![[Python图像处理] 基于离散余弦变换的图像去噪](https://img-blog.csdnimg.cn/a6b1d435fdd944f19a9584d419254e37.png#pic_center)