详情点击链接:“遥感+”蓝碳储量估算、红树林信息提取与论文
一,光谱遥感数据及预处理
.1高光谱遥感数据
高光谱分辨率遥感是用很窄而连续的光谱通道对地物持续遥感成像的技术。在可见光到短波红外波段其光谱分辨率高达纳米数量级。高光谱图像数据可以被看作是由无数波段组合得到的一个立方体图像数据,并且具有光谱覆盖范围广,图谱合一、数据量大,光谱连续的特征。每一条光谱曲线都分别对应与代表着一个光谱像元。对地物特性而言,同一种地物应该存在相同的光谱曲线特征,因此在判断像元分类时往往依靠光谱特征属性来确定是否属于同一种地物。
1.2高光谱数据预处理
高光谱图像预处理包括坏波段剔除、辐射定标和大气校正以及图像裁剪。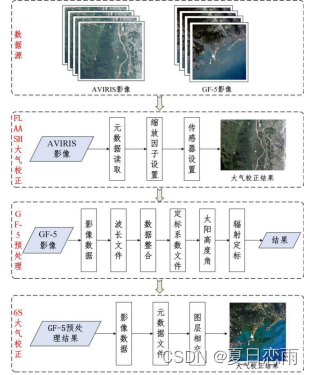
- 坏波段剔除
由于大气散射、水汽吸收、成像系统、传感器等因素的影响,高光谱影像中有部分波段影像质量较差,需要将这些波段剔除。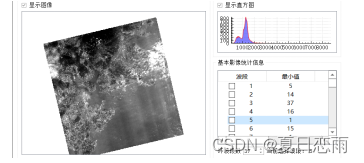
- 辐射定标
通过辐射定对数据采集和传输系统引起的系统、随机辐射失真或畸变进行的校正,去除或纠正因辐射误差而引起影像失真的过程。
- 大气校正
原理:大气反射、吸收、散射、折射和投射会不同程度的影响传感器记录地物反射的电磁波辐射,大气校正即消除大气影响所造成的误差,反演地物真实反射率的过程。
方法:目前遥感图像的大气校正方法主要有统计特征学模型、地面线性回归经验模型、大气辐射传输理论模型三类。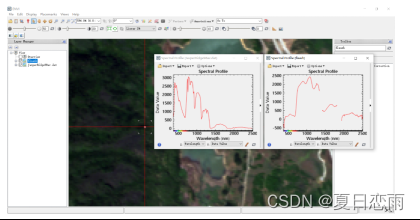
二,光谱特征分析与参量提取
2.1光谱特征分析
红树林植被在可见光和近红外波段表现出典型绿色植物的主要光谱响应特征。在可见光波段,植物光谱主要受叶绿素含量的影响,470nm蓝光波段和670nm红光波段附近叶绿素吸收辐射能形成吸收谷,在550nm绿光波段附近吸收相对减少,形成绿色反射峰。受叶片内部细胞组织对近红外波段强反射的影响,670~780nm之间“红边”反射迅速增高。近红外波段受叶片内部的细胞结构和叶冠结构对光强烈反射的影响,780~950nm近红外波段内表现出高反射率特征。
2.2光谱特征变换分析
光谱二值编码,光谱微分,连续统去除
示例:连续统去除法
连续统去除法也叫包络线去除法。包络线去除法是一种有效增强吸收特征的光谱分析方法,经过包络线去除后,地物的光谱曲线的吸收特征更加明显,反射率归一化为0 ~ 1之间,有利于光谱吸收特征分析和光谱特征波段选择。并且,包络线去除法能够有效解决高光谱数据冗余的问题。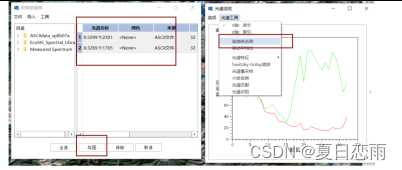
2.3光谱吸收特征参量计算
光谱吸收特征参量包括:吸收位置(absorption position,AP)、吸收深度(absorption depth,AD)、吸收宽度(absorption width,AW)、光谱吸收对称性(absorption asymmetry,AA)和光谱吸收指数(spectral absorption index,SAI)。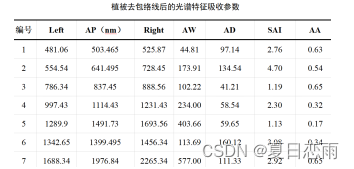
2.4 植被指数提取
(1)计算NDVI(归一化植被指数)
NDVI=(NIR-RED)/(NIR+RED)
(2)计算EMVI(增强型红树林指数)
EMVI=(GREEN-SWIR2)/(SWIR1-GREEN)
2.5红树林信息提取
结合矢量数据与影像计算的结果提取口红树林分布区域;
结合目视解译结果提取红树林信息。
三,高光谱遥感数据分类与制图
3.1混合像元分解
遥感图像中混合像元的存在,是像元级遥感分类和要素反演精度难以达到使用要求的主要原因。为了提高遥感应用的精度,必须解决混合像元分解的问题,使遥感应用由像元级达到亚像元级。进入像元内部,将混合像元分解为不同的“基本组分单元”,或称“端元”,并求得这些基本组分所占的比例(即地物丰度),对混合像元对应地物的真实组成情况进行还原,即所谓的“光谱解混”过程。
混合像元分解包括端元数目估计、端元提取和丰度反演三部分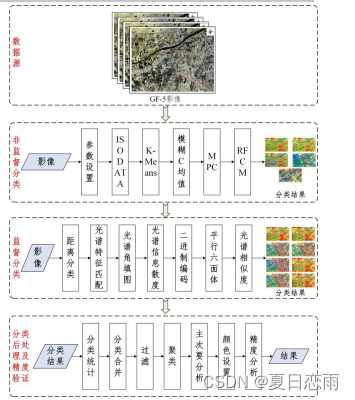
- 端元数目估计
HySime算法估计信号和噪声的相关系数矩阵后,在信号特征向量构成的空间中选择使得投影前后具有最小均方差的子空间,构成该子空间的特征向量个数即为端元估计数目。
- 端元提取
端元波谱作为高光谱分类、地物识别和混合像元分解等过程中的参考波谱,直接影响波谱识别与混合像元分解结果的精度。端元提取的作用是从高光谱图像中提取“纯”地物,即端元的光谱。
端元提取包括顶点成分分析法、正交子空间投影、内部最大体积法(N-FINDR)。
- 丰度反演
丰度反演主要是用来求混合像元中不同成分所占的比例。
丰度反演主要有三种方式,分别是最小二乘法、单形体体积和超平面距离。
3.2 高光谱遥感影像分类
- 高光谱遥感影像分类方法
光谱角填图
光谱相似度
光谱特征匹配
光谱信息散度
ISODATA分类
K-Means分类
模糊 C 均值分类
MPC分类
RFCM分类
- 示例:基于光谱角填图的分类
波谱角分类(SAM)是一个基于自身的波谱分类,它是在n维空间将像元与参照波谱进行匹配。这一算法是通过计算波谱间的角度(将它们作为具有维数等于波段数特征的空间矢量进行处理),判定两个波谱间的相似度。较小的角度代表像元与参照波谱匹配紧密。大于指定的最大弧度阈值的像元不被分入该类。然后生成分类后的图像。
- 分类后处理
对分类后的图像进行分类统计、类别合并以及过滤,得到更加精确的分类结果。
- 精度评价
精度评价是用来计算分类后图像数据与真实地面数据的偏差。
使用地面实测红树林分布数据对红树林分类结果进行精度评价。
四,GEE数据处理
4.1国外Earth Engine(GEE)平台简介
GEE(Google Earth Engine)是由谷歌、卡内基梅隆大学、美国地质调查局(USGS)共同开发的用以处理卫星遥感影像数据和其他地球观测数据的云端运算平台。GEE平台融合了谷歌服务器提供的强大计算能力或者以及大范围的云计算资源,平台数据集提供了对地观测卫星大量完整的影像数据如Sentinel, MODIS,Landsat等,也提供了植被、地表温度和社会经济等数据集,并能做到数据库每天更新。下图是GEE提供的Landsat Collection2数据: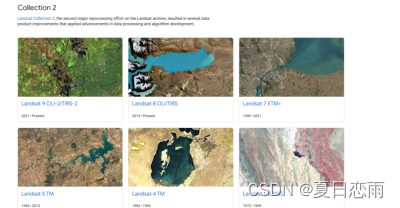
GEE提供了Python和JavaScript版的API,使用基于Web的代码编辑器(IDE)进行快速、交互式算法开发。用于地球引擎JavaScript API的IDE具有如下图的元素: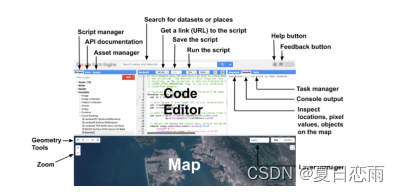
4.2 GEE主要数据类型与对象等
- 几何图形ee.Geometry()
GEE在Geometry下提供了一系列方法,如:LineString(线段)、
Point(点)、MultiPoint(复合点)、Polygon(多边形)等。在Geometry的创建,最快捷的方式是通过用户的点击创建所需的几何图形,如下图所示。在创建完成后会在代码编辑器中自动生成代码。
- 矢量数据ee.Feature()
在GEE中,Feature()类型的矢量数据是一种中间类型的数据,相比于Geometry多了一些需要存储的属性信息,类似于本地矢量数据的属性表。
- 矢量数据集合ee.FeatureCollection()
矢量数据集是GEE中常用的数据格式,在GEE中,矢量数据的操作大多数基于矢量数据集进行。
- 影像数据
Image的创建主要有GEE自带的数据集,用户上传和ee.image()/constant()及ee.Image.pixelLonLat()方法。
- 影像集合
影像集合与矢量集合数据处理方法类似,常用的有过滤方法、循环遍历方法等。
4.3 影像预处理
GEE上提供各种影像数据,大气、地形和几何校正的预处理工作已经完成。但在使用之前,需要对影像进行去云处理。以Landsat8数据为例,基本思路为获取数据的QA波段,设置QA波段的cloudShadowBitMask(云影位)和cloudsBitMaks(云位)均为0,再更新数据的该波段,即可得到去云后的影像。具体代码如下: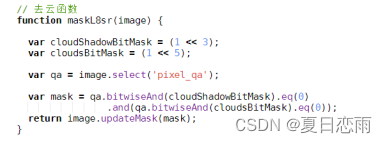
影像去云前后对比:
影像去云处理后,可直接利用ee.ImageCollection()下的filterBounds()、clip()方法和上传至平台的矢量数据,将影像裁剪至研究区范围,提高计算效率。
4.4机器学习分类提取红树林
GEE提供了多种监督分类和非监督分类算法,本例展示使用随机森林法提取2020年漳江口自然保护区红树林分布。
首先需将样本点上上传,划分训练样本和验证样本后构建分类器,最后运用分类器得到结果,部分代码如下图所示: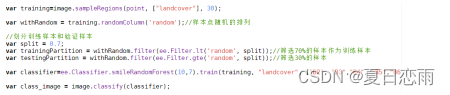
下图为随机森林法提取到的漳江口2020年红树林分布:
4.5红树林植被指数计算及提取
为提高效率,使用植被指数阈值法进行红树林的提取。主要使用两种植被指数:增强型红树林植被指数EMVI和红树林植被指数MVI。
- 增强型红树林植被指数EMVI
增强型红树林植被指数EMVI是Yang Gang等根据红树林与其他植被在绿光波段和中红外波段的光谱特征差异(如下图所示)构建的。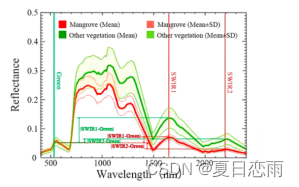
其计算公式为:
EMVI=(GREEN-SIWR2)\(SWIR1-GREEN)
利用该指数提取2020年漳江口国家级自然保护区红树林分布结果如下: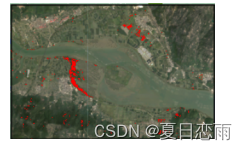
- 红树林植被指数MVI
红树林植被指数MVI是Alvin B.Baloloy等基于红树林与其他植被在绿光波段、近红外波段和中红外波段的差异构建的(如下图):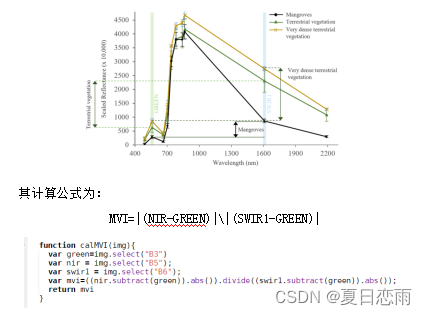
利用该指数提取2020年漳江口国家级自然保护区红树林分布结果如下图所示:
- 指数和阈值的选择
两种用于提取红树林的指数均有较好的效果(红树林纹理特征较明显,可目视解译判断提取效果)。指数及阈值的选择要根据影像数据源、研究区的时空条件而变化。
4.6红树林分布时序分析
利用植被指数阈值法提取红树林的优势在于无需选择样本点,结合GEE的云计算服务,可以高效实现红树林分布的时序分析。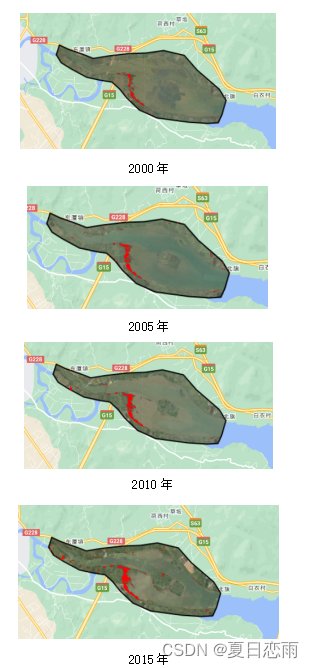

4.7结果统计分析与绘图
- 计算像素面积
通过pixelArea()和Reducer.sum()等方法,计算提取到的红树林的面积,并转化为公顷单位。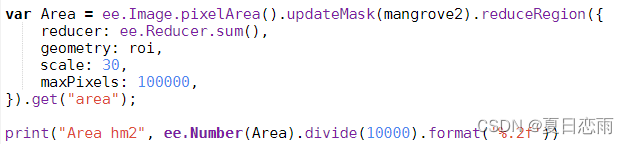
计算2000-2020年红树林面积,结果显示在右侧【Console】栏中,2000、2005、2010、2015、2020年漳江口自然保护区红树林面积分别为21.70、38.56、46.00、56.33、75.27公顷。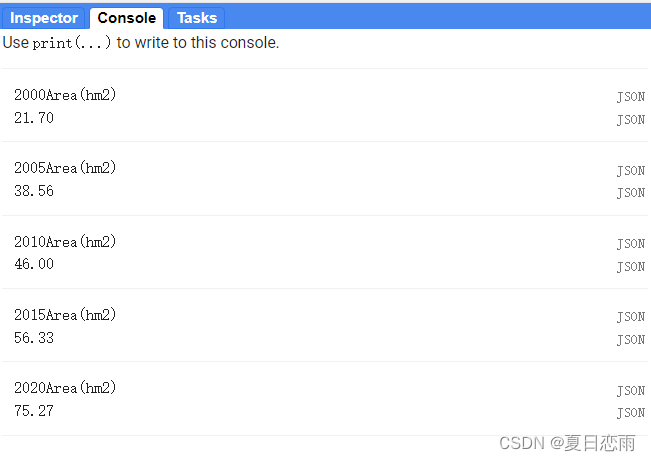
- 生成图表
利用图表可以更直观地展现红树林面积变化的趋势情况。GEE提供了多种图表形式,用户可根据自己的需求进行个性化设计。
4.8数据导出
GEE在Expot()下提供了导出影像到云盘的功能,用户设置需要导出的影像、影像描述、比例、区域以及最大像元数,运行后即可在右侧【Task】栏中运行任务,将影像导出,导出结果为Tiff格式。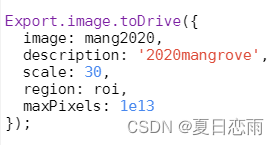
导出2020年漳江口自然保护区红树林提取结果,在ArcGIS中打开,如下图所示: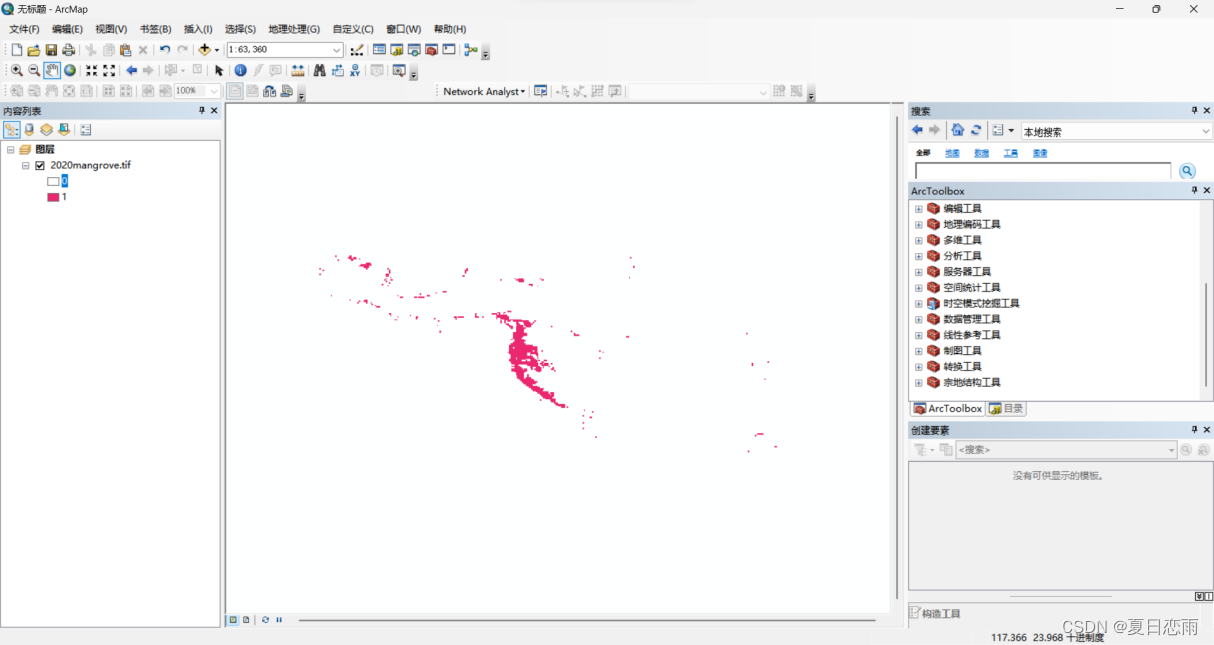
五,碳储量时空变化与预测
5.1基于InVEST模型的碳储量估算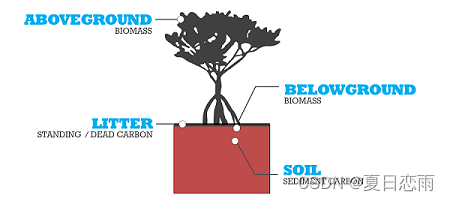
基于高光谱影像提取后的红树林以及红树林地上、地下碳密度,依据InVEST
模型中碳储量模块的计算方法,进行碳储量计算。生态系统的碳储量由地上碳储量、地下碳储量、土壤碳储量和死亡有机碳储量四个基本碳库组成,模型的计算公式为:
- 碳储存估算

- 碳积累估算
- 碳损失估算

- 净碳固定估算

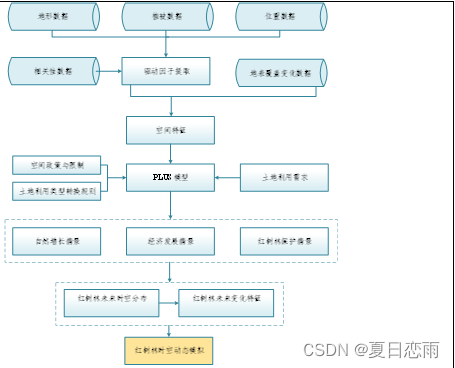
5.2 基于PLUS模型的碳储量的时空变化分析与预测
- 实现思路
- PLUS模型数据准备
数据类型
数据格式转换
- 驱动因素选择和处理
驱动因子选择
驱动因子数据制备
驱动因子数据格式转换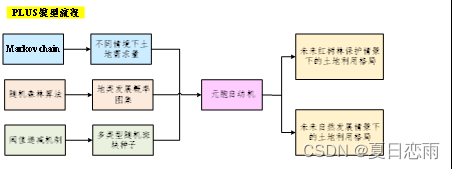
- 土地扩张分析策略(LEAS)模块原理与实现
土地扩张分析策略(LEAS)模块原理
用地扩张提
RF算法提取土地利用类型的发展潜力
- 多类随机斑块种子的CA模型(CARS)模块原理与实现
(CARS)模块原理介绍
模块运行数据制备
Markov土地利用预测
未来土地利用分布模拟
模拟精度验证
场景多样性分析
- 碳储量的时空变化分析与预测
驱动因素影响分析
六,科技论文写作与制图
- 科技论文结构分析
- 科技论文图表规范
- 图表优化技巧
- 论文投稿技巧分析
- SCI论文案例分析







![[Linux]环境变量](https://img-blog.csdnimg.cn/d7b54996589f4203b1f5f721205968b7.png)