添加FreeModbus代码
首先准备一个空白的标准库项目。
下载FreeModbus源码。
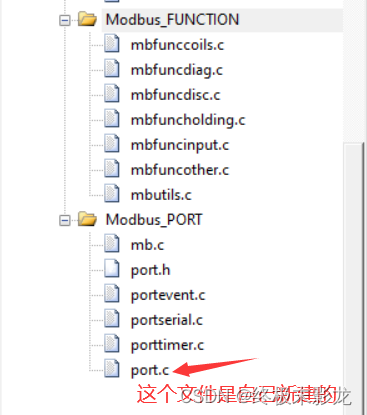
将源码中的modbus文件夹复制到项目路径下,并把demo->BARE->port文件夹的内容也添加进来。
新建一个文件port.c备用。然后打开项目,将上述文件添加至项目,最好是按照文件夹建立不同分组。
完成后的项目结构如下:
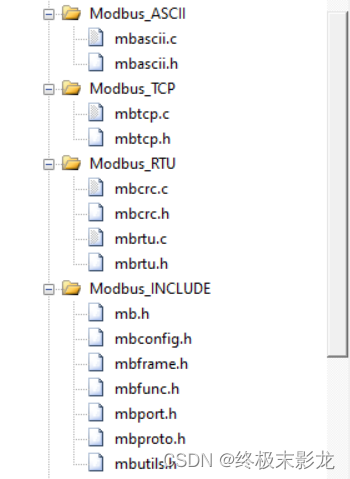
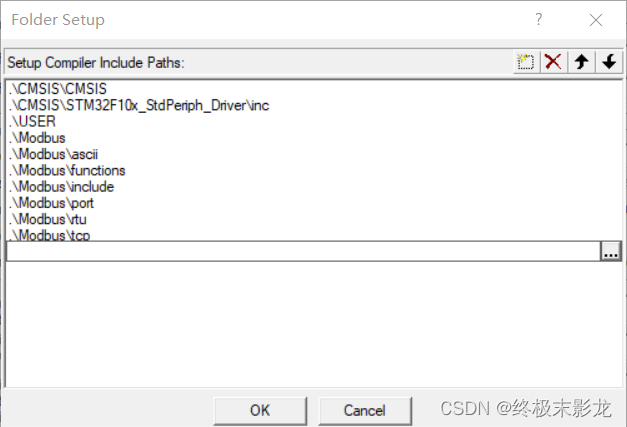
然后添加头文件路径,将modbus与port文件夹的内容包含。
修改代码
portserial.c
首先是串口文件portserial.c
void
vMBPortSerialEnable( BOOL xRxEnable, BOOL xTxEnable )
{
}
BOOL
xMBPortSerialInit( UCHAR ucPORT, ULONG ulBaudRate, UCHAR ucDataBits, eMBParity eParity )
{
return FALSE;
}
BOOL
xMBPortSerialPutByte( CHAR ucByte )
{
return TRUE;
}
BOOL
xMBPortSerialGetByte( CHAR * pucByte )
{
return TRUE;
}
static void prvvUARTTxReadyISR( void )
{
pxMBFrameCBTransmitterEmpty( );
}
static void prvvUARTRxISR( void )
{
pxMBFrameCBByteReceived( );
}
我们进行以下修改
在vMBPortSerialEnable函数进行串口中断的使能与失能,其实是切换发送或者接收。FreeModbus使用中断来进行数据的收发,但是由于Modbus协议特性,同时只能开启一种中断,即不能进行同时收发。
根据参数xRxEnable与xTxEnable的值,开启或关闭对应中断。这里发送中断选择TC、接收中断选择RXNE。
void
vMBPortSerialEnable( BOOL xRxEnable, BOOL xTxEnable )
{
if (xTxEnable)
{
USART_ITConfig(USART3,USART_IT_TC,ENABLE);
}
else
{
USART_ITConfig(USART3,USART_IT_TC,DISABLE);
}
if (xRxEnable)
{
USART_ITConfig(USART3,USART_IT_RXNE,ENABLE);
}
else
{
USART_ITConfig(USART3,USART_IT_RXNE,DISABLE);
}
}
xMBPortSerialInit函数进行串口初始化。传入的参数是串口、波特率、数据位与校验位。根据传入的参数对串口初始化,初始化成功返回TRUE,否则返回FALSE。
可以通过传入的参数进行灵活初始化,也可以不管参数,将初始化写死。这里使用UART3,波特率与参数一致,停止位1位,无校验位
BOOL
xMBPortSerialInit( UCHAR ucPORT, ULONG ulBaudRate, UCHAR ucDataBits, eMBParity eParity )
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);//打开串口3的GPIO时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART3,ENABLE);//打开串口3时钟
//配置USART3的RX,TX的GPIO口
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_10; //将USART3_TX配置为复用推挽输出模式
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&GPIO_InitStruct);
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_11; //将USART3_RX配置为浮空输入模式
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&GPIO_InitStruct);
//配置USART3
USART_InitTypeDef USART_InitStruct;
USART_InitStruct.USART_WordLength = USART_WordLength_8b;
USART_InitStruct.USART_StopBits = USART_StopBits_1;
USART_InitStruct.USART_BaudRate = ulBaudRate;
USART_InitStruct.USART_Parity = USART_Parity_No;
USART_InitStruct.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStruct.USART_Mode = USART_Mode_Rx|USART_Mode_Tx;
USART_Init(USART3,&USART_InitStruct);
USART_Cmd(USART3,ENABLE);
//配置中断
NVIC_InitTypeDef NVIC_InitStruct;
NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStruct.NVIC_IRQChannelSubPriority = 1;
NVIC_InitStruct.NVIC_IRQChannel = USART3_IRQn;
NVIC_Init(&NVIC_InitStruct);
return TRUE;
}
xMBPortSerialPutByte与xMBPortSerialGetByte实现单字节收发
BOOL
xMBPortSerialPutByte( CHAR ucByte )
{
USART_SendData(USART3,ucByte);
return TRUE;
}
BOOL
xMBPortSerialGetByte( CHAR * pucByte )
{
*pucByte = USART_ReceiveData(USART3);
return TRUE;
}
实现串口的中断函数。要求是发生发送与接收中断时,调用对应的函数。
void USART3_IRQHandler(void)
{
if(USART_GetITStatus(USART3, USART_IT_RXNE) == SET)
{
prvvUARTRxISR();
USART_ClearITPendingBit(USART3, USART_IT_RXNE);
}
if(USART_GetITStatus(USART3, USART_IT_TC) == SET)
{
prvvUARTTxReadyISR();
USART_ClearITPendingBit(USART3, USART_IT_TC);
}
}
完整的portserial.c函数如下:
#include "port.h"
#include "stm32f10x.h"
/* ----------------------- Modbus includes ----------------------------------*/
#include "mb.h"
#include "mbport.h"
/* ----------------------- static functions ---------------------------------*/
static void prvvUARTTxReadyISR( void );
static void prvvUARTRxISR( void );
/* ----------------------- Start implementation -----------------------------*/
void
vMBPortSerialEnable( BOOL xRxEnable, BOOL xTxEnable )
{
if (xTxEnable)
{
USART_ITConfig(USART3,USART_IT_TC,ENABLE);
}
else
{
USART_ITConfig(USART3,USART_IT_TC,DISABLE);
}
if (xRxEnable)
{
USART_ITConfig(USART3,USART_IT_RXNE,ENABLE);
}
else
{
USART_ITConfig(USART3,USART_IT_RXNE,DISABLE);
}
}
BOOL
xMBPortSerialInit( UCHAR ucPORT, ULONG ulBaudRate, UCHAR ucDataBits, eMBParity eParity )
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);//打开串口3的GPIO时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART3,ENABLE);//打开串口3时钟
//配置USART3的RX,TX的GPIO口
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_10; //将USART3_TX配置为复用推挽输出模式
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&GPIO_InitStruct);
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_11; //将USART3_RX配置为浮空输入模式
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&GPIO_InitStruct);
//配置USART3
USART_InitTypeDef USART_InitStruct;
USART_InitStruct.USART_WordLength = USART_WordLength_8b;
USART_InitStruct.USART_StopBits = USART_StopBits_1;
USART_InitStruct.USART_BaudRate = ulBaudRate;
USART_InitStruct.USART_Parity = USART_Parity_No;
USART_InitStruct.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStruct.USART_Mode = USART_Mode_Rx|USART_Mode_Tx;
USART_Init(USART3,&USART_InitStruct);
USART_Cmd(USART3,ENABLE);
//配置中断
NVIC_InitTypeDef NVIC_InitStruct;
NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStruct.NVIC_IRQChannelSubPriority = 1;
NVIC_InitStruct.NVIC_IRQChannel = USART3_IRQn;
NVIC_Init(&NVIC_InitStruct);
return TRUE;
}
BOOL
xMBPortSerialPutByte( CHAR ucByte )
{
USART_SendData(USART3,ucByte);
return TRUE;
}
BOOL
xMBPortSerialGetByte( CHAR * pucByte )
{
*pucByte = USART_ReceiveData(USART3);
return TRUE;
}
/* Create an interrupt handler for the transmit buffer empty interrupt
* (or an equivalent) for your target processor. This function should then
* call pxMBFrameCBTransmitterEmpty( ) which tells the protocol stack that
* a new character can be sent. The protocol stack will then call
* xMBPortSerialPutByte( ) to send the character.
*/
static void prvvUARTTxReadyISR( void )
{
pxMBFrameCBTransmitterEmpty( );
}
/* Create an interrupt handler for the receive interrupt for your target
* processor. This function should then call pxMBFrameCBByteReceived( ). The
* protocol stack will then call xMBPortSerialGetByte( ) to retrieve the
* character.
*/
static void prvvUARTRxISR( void )
{
pxMBFrameCBByteReceived( );
}
void USART3_IRQHandler(void)
{
if(USART_GetITStatus(USART3, USART_IT_RXNE) == SET)
{
prvvUARTRxISR();
USART_ClearITPendingBit(USART3, USART_IT_RXNE);
}
if(USART_GetITStatus(USART3, USART_IT_TC) == SET)
{
prvvUARTTxReadyISR();
USART_ClearITPendingBit(USART3, USART_IT_TC);
}
}
porttimer.c
本文件夹是初始化定时器,实现帧结束的截取。
xMBPortTimersInit初始化定时器,需要将计数间隔设定为50us(设时钟72MHz,这里将分频系数设置到3600-1,实现50us计时),定时周期按参数设置,并使能更新中断。这里我使用TIM1。
BOOL
xMBPortTimersInit( USHORT usTim1Timerout50us )
{
RCC_APB2PeriphClockCmd(RCC_APB2ENR_TIM1EN,ENABLE);
TIM_TimeBaseInitTypeDef tbit;
tbit.TIM_Prescaler = 3600-1;
tbit.TIM_Period = usTim1Timerout50us;
tbit.TIM_ClockDivision = TIM_CKD_DIV1;
tbit.TIM_CounterMode = TIM_CounterMode_Up;
tbit.TIM_RepetitionCounter = 0;
TIM_TimeBaseInit(TIM1,&tbit);
TIM_ClearFlag(TIM1,TIM_IT_Update);
NVIC_InitTypeDef nvic_inittypeddef;
nvic_inittypeddef.NVIC_IRQChannel = TIM1_UP_IRQn;
nvic_inittypeddef.NVIC_IRQChannelCmd = ENABLE;
nvic_inittypeddef.NVIC_IRQChannelPreemptionPriority = 0;
nvic_inittypeddef.NVIC_IRQChannelSubPriority = 3;
NVIC_Init(&nvic_inittypeddef);
return TRUE;
}
vMBPortTimersEnable与vMBPortTimersDisable函数进行定时器的使能与失能(去掉inline)。并写对应的中断函数,当中断触发时调用FreeModbus写好的处理函数。
void
vMBPortTimersEnable( )
{
TIM_ClearITPendingBit(TIM1, TIM_IT_Update);
TIM_ITConfig(TIM1, TIM_IT_Update, ENABLE);
TIM_SetCounter(TIM1, 0);
TIM_Cmd(TIM1, ENABLE);
/* Enable the timer with the timeout passed to xMBPortTimersInit( ) */
}
void
vMBPortTimersDisable( )
{
TIM_ClearITPendingBit(TIM1, TIM_IT_Update);
TIM_ITConfig(TIM1, TIM_IT_Update, DISABLE);
TIM_SetCounter(TIM1, 0);
TIM_Cmd(TIM1, DISABLE);
/* Disable any pending timers. */
}
void TIM1_UP_IRQHandler(void)
{
if (TIM_GetITStatus(TIM1, TIM_IT_Update) != RESET)
{
prvvTIMERExpiredISR();
TIM_ClearITPendingBit(TIM1, TIM_IT_Update);
}
}
以下是本文件全部内容:
/* ----------------------- Platform includes --------------------------------*/
#include "port.h"
#include "stm32f10x.h"
/* ----------------------- Modbus includes ----------------------------------*/
#include "mb.h"
#include "mbport.h"
/* ----------------------- static functions ---------------------------------*/
static void prvvTIMERExpiredISR( void );
/* ----------------------- Start implementation -----------------------------*/
BOOL
xMBPortTimersInit( USHORT usTim1Timerout50us )
{
RCC_APB2PeriphClockCmd(RCC_APB2ENR_TIM1EN,ENABLE);
TIM_TimeBaseInitTypeDef tbit;
tbit.TIM_Prescaler = 3600-1;
tbit.TIM_Period = usTim1Timerout50us;
tbit.TIM_ClockDivision = TIM_CKD_DIV1;
tbit.TIM_CounterMode = TIM_CounterMode_Up;
tbit.TIM_RepetitionCounter = 0;
TIM_TimeBaseInit(TIM1,&tbit);
TIM_ClearFlag(TIM1,TIM_IT_Update);
NVIC_InitTypeDef nvic_inittypeddef;
nvic_inittypeddef.NVIC_IRQChannel = TIM1_UP_IRQn;
nvic_inittypeddef.NVIC_IRQChannelCmd = ENABLE;
nvic_inittypeddef.NVIC_IRQChannelPreemptionPriority = 0;
nvic_inittypeddef.NVIC_IRQChannelSubPriority = 3;
NVIC_Init(&nvic_inittypeddef);
return TRUE;
}
void
vMBPortTimersEnable( )
{
TIM_ClearITPendingBit(TIM1, TIM_IT_Update);
TIM_ITConfig(TIM1, TIM_IT_Update, ENABLE);
TIM_SetCounter(TIM1, 0);
TIM_Cmd(TIM1, ENABLE);
/* Enable the timer with the timeout passed to xMBPortTimersInit( ) */
}
void
vMBPortTimersDisable( )
{
TIM_ClearITPendingBit(TIM1, TIM_IT_Update);
TIM_ITConfig(TIM1, TIM_IT_Update, DISABLE);
TIM_SetCounter(TIM1, 0);
TIM_Cmd(TIM1, DISABLE);
/* Disable any pending timers. */
}
/* Create an ISR which is called whenever the timer has expired. This function
* must then call pxMBPortCBTimerExpired( ) to notify the protocol stack that
* the timer has expired.
*/
static void prvvTIMERExpiredISR( void )
{
( void )pxMBPortCBTimerExpired( );
}
void TIM1_UP_IRQHandler(void)
{
if (TIM_GetITStatus(TIM1, TIM_IT_Update) != RESET)
{
prvvTIMERExpiredISR();
TIM_ClearITPendingBit(TIM1, TIM_IT_Update);
}
}
mbconfig.h
第49行将宏MB_ASCII_ENABLED失能,因为我们这里只使用RTU。
这个文件可以选择使能Modbus功能码函数,实现功能裁剪。
此时进行编译,会发现会报以下错误:
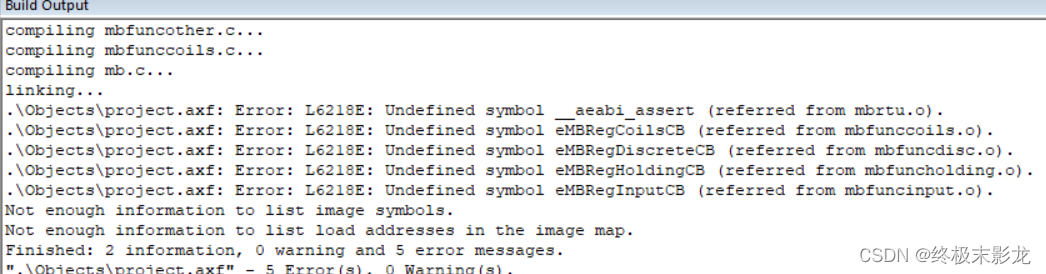 四种数据类型(线圈、离散量、输入寄存器、保持寄存器)的操作函数与断言的定义没有实现,所以需要继续实现它们。
四种数据类型(线圈、离散量、输入寄存器、保持寄存器)的操作函数与断言的定义没有实现,所以需要继续实现它们。
port.c
这个文件是自己新建的,我们在这个文件实现上述缺少的函数。
如何实现这些函数?同样可以参考Demo文件夹中的示例。例如Demo->MSP430->demo.c中的内容,这一部分可以复制到port.c中:
#include "mb.h"
#define REG_INPUT_START 0
#define REG_INPUT_NREGS 10
#define REG_HOLDING_START 0
#define REG_HOLDING_NREGS 10
static USHORT usRegInputStart = REG_INPUT_START;
static USHORT usRegInputBuf[REG_INPUT_NREGS];
static USHORT usRegHoldingStart = REG_HOLDING_START;
static USHORT usRegHoldingBuf[REG_HOLDING_NREGS];
eMBErrorCode
eMBRegInputCB( UCHAR * pucRegBuffer, USHORT usAddress, USHORT usNRegs )
{
eMBErrorCode eStatus = MB_ENOERR;
int iRegIndex;
if( ( (int16_t)usAddress >= REG_INPUT_START )
&& ( usAddress + usNRegs <= REG_INPUT_START + REG_INPUT_NREGS ) )
{
iRegIndex = ( int )( usAddress - usRegInputStart );
while( usNRegs > 0 )
{
*pucRegBuffer++ = ( unsigned char )( usRegInputBuf[iRegIndex] >> 8 );
*pucRegBuffer++ = ( unsigned char )( usRegInputBuf[iRegIndex] & 0xFF );
iRegIndex++;
usNRegs--;
}
}
else
{
eStatus = MB_ENOREG;
}
return eStatus;
}
eMBErrorCode
eMBRegHoldingCB( UCHAR * pucRegBuffer, USHORT usAddress, USHORT usNRegs, eMBRegisterMode eMode )
{
eMBErrorCode eStatus = MB_ENOERR;
int iRegIndex;
if( ( (int16_t)usAddress >= REG_HOLDING_START ) &&
( usAddress + usNRegs <= REG_HOLDING_START + REG_HOLDING_NREGS ) )
{
iRegIndex = ( int )( usAddress - usRegHoldingStart );
switch ( eMode )
{
/* Pass current register values to the protocol stack. */
case MB_REG_READ:
while( usNRegs > 0 )
{
*pucRegBuffer++ = ( unsigned char )( usRegHoldingBuf[iRegIndex] >> 8 );
*pucRegBuffer++ = ( unsigned char )( usRegHoldingBuf[iRegIndex] & 0xFF );
iRegIndex++;
usNRegs--;
}
break;
/* Update current register values with new values from the
* protocol stack. */
case MB_REG_WRITE:
while( usNRegs > 0 )
{
usRegHoldingBuf[iRegIndex] = *pucRegBuffer++ << 8;
usRegHoldingBuf[iRegIndex] |= *pucRegBuffer++;
iRegIndex++;
usNRegs--;
}
}
}
else
{
eStatus = MB_ENOREG;
}
return eStatus;
}
前面的数组usRegInputBuf与usRegHoldingBuf就是操作的输入寄存器与保持寄存器,而REG_INPUT_START与REG_HOLDING_START是这两类寄存器的起始地址。当从机收到特定的功能码时,会转为对这些数据变量的操作。
下面的eMBRegInputCB与eMBRegHoldingCB就是输入寄存器与保持寄存器对应的处理函数。在Modbus协议层面来讲就是实现了对应的功能码。虽然目前看不懂具体实现,但是只需要贴进来用即可。
下面打开源码Demo->STR71X->excolis.c与exdisc.c,线圈量与离散量的处理函数就在里面。与寄存器类似,将它们复制到port.c。
#include "mbutils.h"
#define REG_COILS_START 0
#define REG_COILS_SIZE 16
static unsigned char ucRegCoilsBuf[REG_COILS_SIZE / 8];
eMBErrorCode
eMBRegCoilsCB( UCHAR * pucRegBuffer, USHORT usAddress, USHORT usNCoils,
eMBRegisterMode eMode )
{
eMBErrorCode eStatus = MB_ENOERR;
int iNCoils = ( int )usNCoils;
unsigned short usBitOffset;
/* Check if we have registers mapped at this block. */
if( ( (int16_t)usAddress >= REG_COILS_START ) &&
( usAddress + usNCoils <= REG_COILS_START + REG_COILS_SIZE ) )
{
usBitOffset = ( unsigned short )( usAddress - REG_COILS_START );
switch ( eMode )
{
/* Read current values and pass to protocol stack. */
case MB_REG_READ:
while( iNCoils > 0 )
{
*pucRegBuffer++ =
xMBUtilGetBits( ucRegCoilsBuf, usBitOffset,
( unsigned char )( iNCoils >
8 ? 8 :
iNCoils ) );
iNCoils -= 8;
usBitOffset += 8;
}
break;
/* Update current register values. */
case MB_REG_WRITE:
while( iNCoils > 0 )
{
xMBUtilSetBits( ucRegCoilsBuf, usBitOffset,
( unsigned char )( iNCoils > 8 ? 8 : iNCoils ),
*pucRegBuffer++ );
iNCoils -= 8;
usBitOffset += 8;
}
break;
}
}
else
{
eStatus = MB_ENOREG;
}
return eStatus;
}
#define REG_DISC_START 0
#define REG_DISC_SIZE 16
static unsigned char ucRegDiscBuf[REG_DISC_SIZE / 8] = { 0, 0 };
eMBErrorCode
eMBRegDiscreteCB( UCHAR * pucRegBuffer, USHORT usAddress, USHORT usNDiscrete )
{
eMBErrorCode eStatus = MB_ENOERR;
short iNDiscrete = ( short )usNDiscrete;
unsigned short usBitOffset;
/* Check if we have registers mapped at this block. */
if( ( (int16_t)usAddress >= REG_DISC_START ) &&
( usAddress + usNDiscrete <= REG_DISC_START + REG_DISC_SIZE ) )
{
usBitOffset = ( unsigned short )( usAddress - REG_DISC_START );
while( iNDiscrete > 0 )
{
*pucRegBuffer++ =
xMBUtilGetBits( ucRegDiscBuf, usBitOffset,
( unsigned char )( iNDiscrete >
8 ? 8 : iNDiscrete ) );
iNDiscrete -= 8;
usBitOffset += 8;
}
}
else
{
eStatus = MB_ENOREG;
}
return eStatus;
}
注意,开关量与离散量都是位数据,因此数组长度会除以8。
然后再给断言函数加上,整个port.c就写好了。
void __aeabi_assert(const char * x1, const char * x2, int x3)
{
}
实现上述函数与数据,就实现了Modbus绝大多数功能码。
mbrtu.c的eMBRTUSend函数
第213行后面添加代码:
xMBPortSerialPutByte( ( CHAR )*pucSndBufferCur );
pucSndBufferCur++; /* next byte in sendbuffer. */
usSndBufferCount--;
更新后的eMBRTUSend函数:
eMBErrorCode
eMBRTUSend( UCHAR ucSlaveAddress, const UCHAR * pucFrame, USHORT usLength )
{
eMBErrorCode eStatus = MB_ENOERR;
USHORT usCRC16;
ENTER_CRITICAL_SECTION( );
/* Check if the receiver is still in idle state. If not we where to
* slow with processing the received frame and the master sent another
* frame on the network. We have to abort sending the frame.
*/
if( eRcvState == STATE_RX_IDLE )
{
/* First byte before the Modbus-PDU is the slave address. */
pucSndBufferCur = ( UCHAR * ) pucFrame - 1;
usSndBufferCount = 1;
/* Now copy the Modbus-PDU into the Modbus-Serial-Line-PDU. */
pucSndBufferCur[MB_SER_PDU_ADDR_OFF] = ucSlaveAddress;
usSndBufferCount += usLength;
/* Calculate CRC16 checksum for Modbus-Serial-Line-PDU. */
usCRC16 = usMBCRC16( ( UCHAR * ) pucSndBufferCur, usSndBufferCount );
ucRTUBuf[usSndBufferCount++] = ( UCHAR )( usCRC16 & 0xFF );
ucRTUBuf[usSndBufferCount++] = ( UCHAR )( usCRC16 >> 8 );
/* Activate the transmitter. */
eSndState = STATE_TX_XMIT;
xMBPortSerialPutByte((CHAR)*pucSndBufferCur);
pucSndBufferCur++;
usSndBufferCount--;
vMBPortSerialEnable( FALSE, TRUE );
}
else
{
eStatus = MB_EIO;
}
EXIT_CRITICAL_SECTION( );
return eStatus;
}
mbfunccoils.c,mbfuncdisc.c,mbfuncholding.c,mbfuncinput.c
首先去掉所有的usRegAddress++,否则实际操作会比期望地址大一。
然后mbfuncholding.c第185行,添加一个或负号:
usRegCount |= ( USHORT )( pucFrame[MB_PDU_FUNC_READ_REGCNT_OFF + 1] );
至此,代码修改完成,编译应该没有error了。
测试
main文件
#include "stm32f10x.h"
#include "mb.h"
int main(void){
eMBInit(MB_RTU, 0X01, 3, 9600, MB_PAR_NONE);//初始化FreeModbus
eMBEnable();//FreeModbus使能
while (1)
{
eMBPoll();//在while (1)循环调用eMBPoll()
}
}
eMBInit进行初始化,其中第一个参数表示协议,第二个参数是从机地址,后面三个是初始化串口那个函数的参数,可以跳转到那里进行对照(这里配置为串口3,波特率9600,不校验)
eMBEnable()启动FreeModbus后,不断调用eMBPoll()即可。
port.c
这里我们修改一下各个位数据与寄存器的初始值,方便观察结果。
static USHORT usRegInputBuf[REG_INPUT_NREGS] = {0,1,2,3,4,5,6,7,8,9};
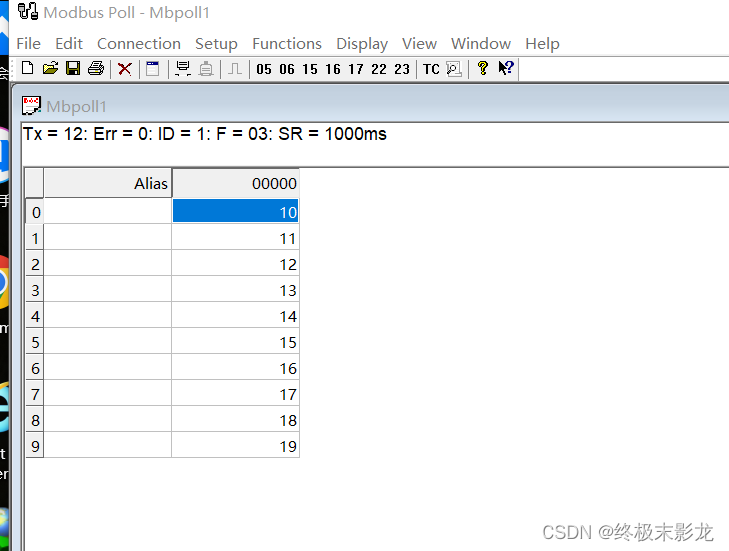
static USHORT usRegHoldingBuf[REG_HOLDING_NREGS] = {10,11,12,13,14,15,16,17,18,19};
static unsigned char ucRegCoilsBuf[REG_COILS_SIZE / 8] = {0x12,0x34};
static unsigned char ucRegDiscBuf[REG_DISC_SIZE / 8] = {0x56,0x78};
使用ModbusPoll连接,看到可以正常读出数据: