【PID精讲12】基于MATLAB和Simulink的仿真教程
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.mfbz.cn/a/272728.html
如若内容造成侵权/违法违规/事实不符,请联系我们进行投诉反馈qq邮箱809451989@qq.com,一经查实,立即删除!相关文章
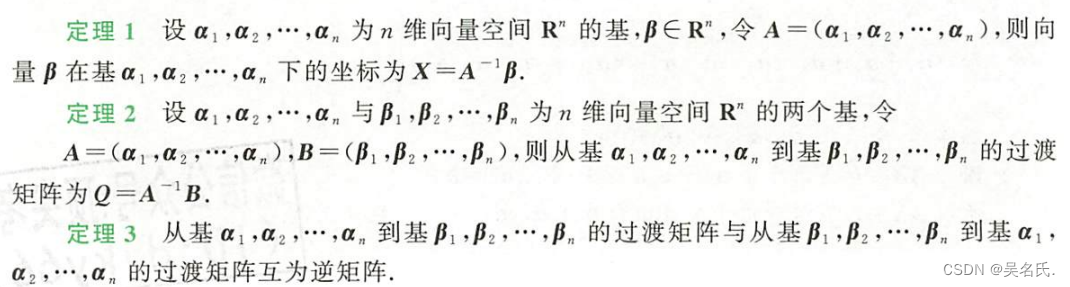
线性代数基础【3】向量
第一节 向量的概念与运算
一、基本概念
①向量
②向量的模(长度)
③向量的单位化
④向量的三则运算
⑤向量的内积
二、向量运算的性质
(一)向量三则运算的性质
α β β αα (β γ) (α β) γk (α β) kα kβ(k l) α kα lα
(二)向量内积运…
什么是GeoTrust?
在当今数字化时代,网络安全是至关重要的。GeoTrust,作为全球领先的SSL证书提供商,致力于为用户提供卓越的数字安全解决方案。 产品与服务:
域名验证证书: 提供快速简便的验证,是保护网站和用户数据的基础。…
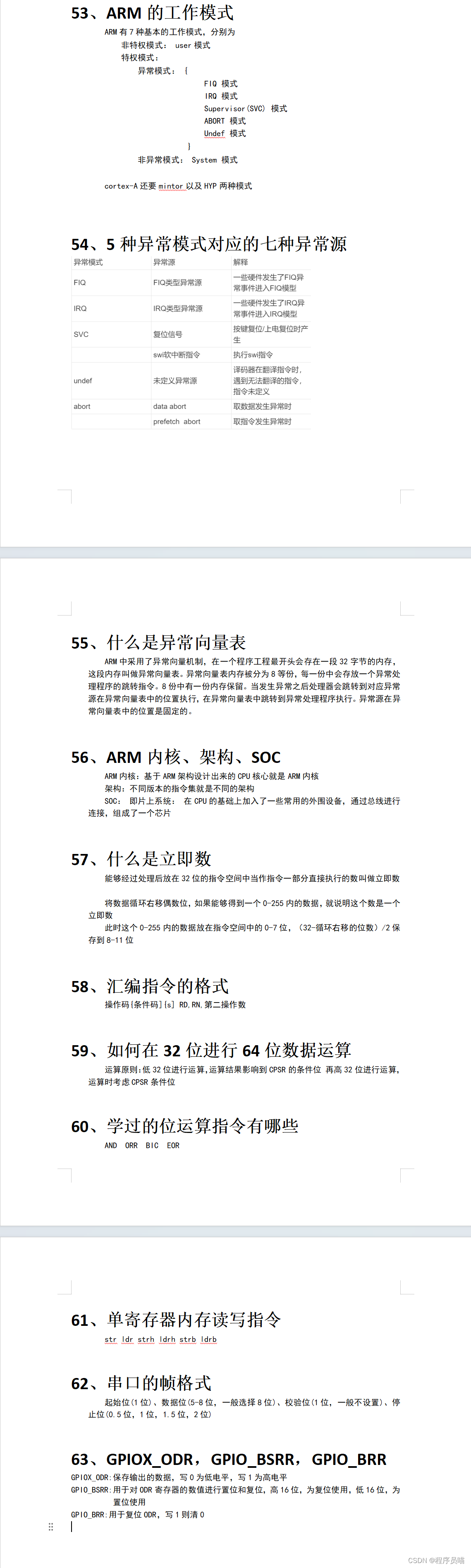
华清远见嵌入式学习——ARM——作业4
作业要求: 代码运行效果图: 代码:
do_irq.c:
#include "key_it.h"
extern void printf(const char *fmt, ...);
unsigned int i 0;//延时函数
void delay(int ms)
{int i,j;for(i0;i<ms;i){for(j0;j<2000;j);}
}void do_i…
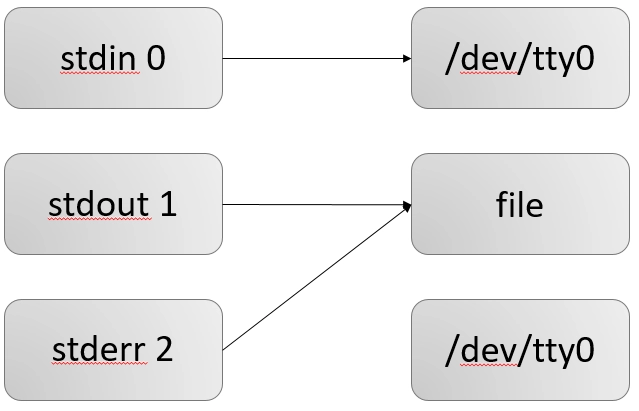
【linux】Linux重定向
在Linux操作系统中,命令行界面是一个强大的工具,它允许用户与系统进行高效的交互。重定向是命令行中一个非常重要的概念,它可以改变命令输入和输出的默认路径。通过重定向,用户可以将数据从一个程序传递到另一个程序,或…
LENOVO联想笔记本小新Pro 14 IRH8 2023款(83AL)电脑原装出厂Win11系统恢复预装OEM系统
链接:https://pan.baidu.com/s/1M1iSFahokiIHF3CppNpL4w?pwdzr8y
提取码:zr8y
联想原厂系统自带所有驱动、出厂主题壁纸、Office办公软件、联想电脑管家等自带的预装软件程序
所需要工具:16G或以上的U盘
文件格式:ISO 文件…
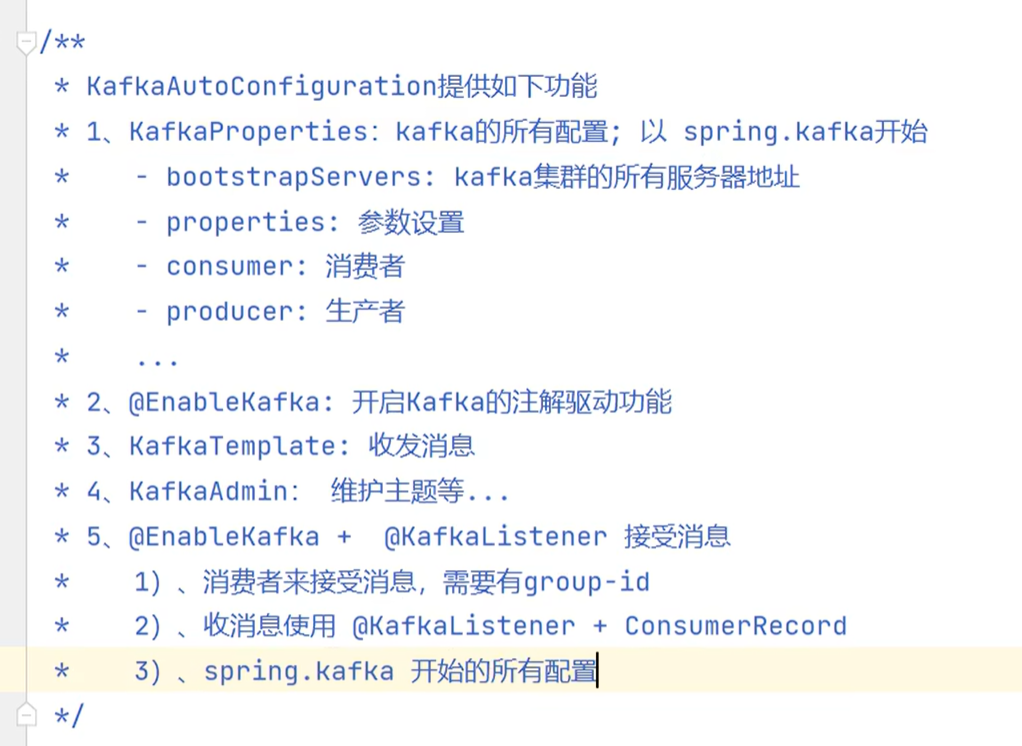
SpringBoot3 整合Kafka
官网:https://kafka.apache.org/documentation/ 消息队列-场景
1. 异步 2. 解耦 3. 削峰 4. 缓冲 消息队列-Kafka
1. 消息模式 消息发布订阅模式,MessageQueue中的消息不删除,会记录消费者的偏移量
2. Kafka工作原理 同一个消费者组里的消…
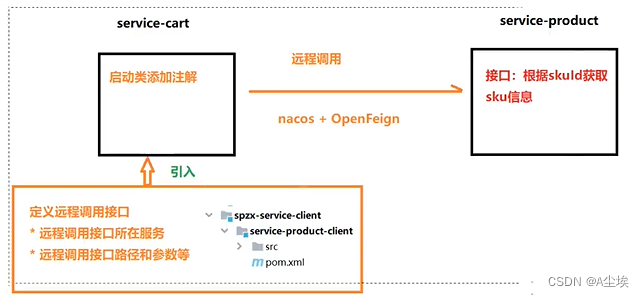
开发辅助一(网关gateway+ThreadLocal封装用户信息+远程调用+读取配置文件+统一异常处理)
网关gateway模块
①、配置文件,添加各个服务模块的路由路径
gateway:routes:-id: server-cart #微服务名称uri: lb://service-cart #负责均衡predicates:- Path/api/order/cart/**ThreadLocal
①、定义一个工具类
public class AuthContextUtil{private static…

Zookeeper应用场景有哪些?
ZooKeeper是⼀个典型的发布/订阅模式的分布式数据管理与协调框架,我们可以使⽤它来进⾏分布式数据的发布与订阅。另⼀⽅⾯,通过对ZooKeeper中丰富的数据节点类型进⾏交叉使⽤,配合Watcher事件通知机制,可以⾮常⽅便地构建⼀系列分…

记一次Mac端mysql重置密码
在执行mysql命令的时候,报如下的错误,表示不支持mysql命令:
zsh: command not found: mysql
1. 先查看mysql服务是否存在
在系统偏好设置中查看: 2. 发现mysql服务已经在运行,可能因为/usr/local/bin目录下缺失mysq…
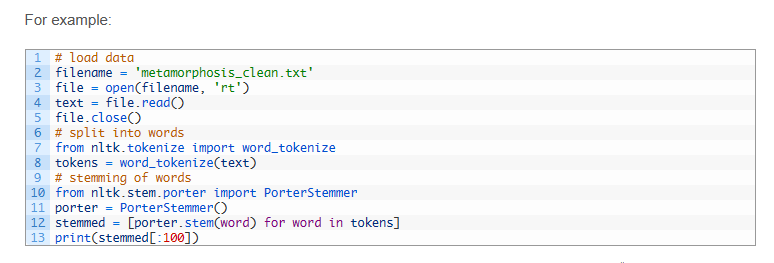
How to Clean Text for Machine Learning with Python
NLP
在本教程中,您将了解如何清理和准备文本,以便使用机器学习进行建模。
完成本教程后,您将了解:
如何通过开发自己的非常简单的文本清理工具开始。 如何更上一层楼并使用 NLTK 库中更复杂的方法。 在使用现代文本表示方法&am…

python3遇到Can‘t connect to HTTPS URL because the SSL module is not available.
远程服务器centos7系统上有minicoda3,觉得太占空间,就把整个文件夹删了,原先的Python3也没了,都要重装。
我自己的步骤:进入管理员模式 1.下载Python3的源码: wget https://www.python.org/ftp/python/3.1…
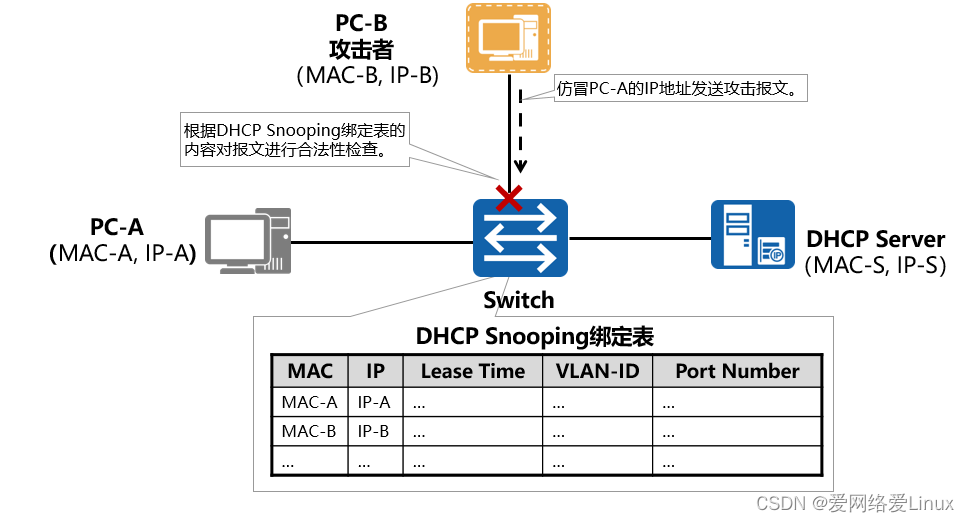
熟悉DHCP面临的安全威胁与防护机制
一个网络如果要正常地运行,则网络中的主机(Host)必需要知道某些重要的网络参数,如IP地址、网络掩码、网关地址、DNS服务器地址、网络打印机地址等等。显然,在每台主机上都采用手工方式来配置这些参数是非常困难的、或是…

c语言结构体(初阶)
1. 结构体的声明
1.1 结构体的基础知识
结构是一些值的集合,这些值被称为成员变量。结构的每个成员可以是不同类型的变量。
1.2 结构的声明
struct tag
{member - list;
}variable-list;
例:描述一个人的信息:名字电话性别身高
//声明的…

使用python netmiko模块批量配置Cisco、华为、H3C路由器交换机(支持 telnet 和 ssh 方式)
0. 当前环境
外网电脑Python版本:3.8.5(安装后不要删除安装包,以后卸载的时候用这个)外网电脑安装netmiko第三方库:cmd中输入pip install netmiko内网电脑环境:无法搭建python环境,需外网电脑完…
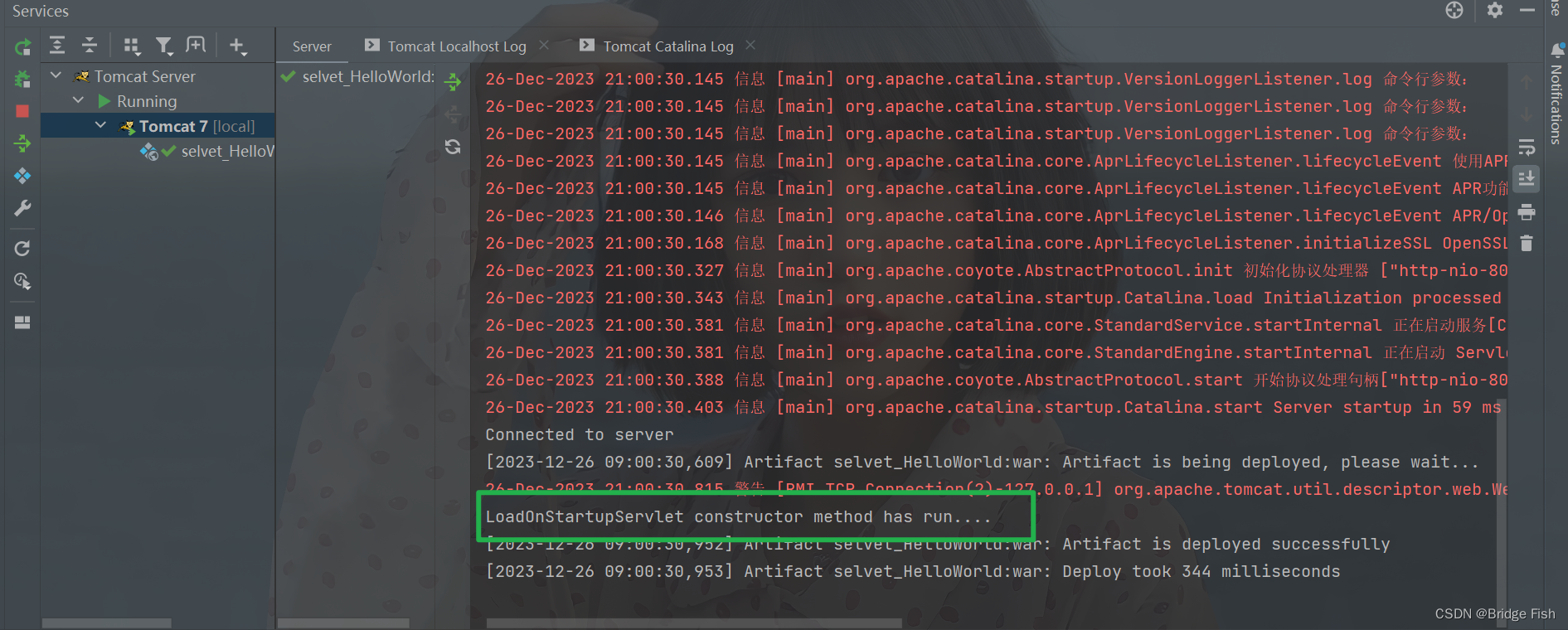
怎么实现Servlet的自动加载
在实际开发时,有时候会希望某些Servlet程序可以在Tomcat启动时随即启动。但在默认情况下,第一次访问servlet的时候,才创建servlet对象。
如果servlet构造函数里面的代码或者init方法里面的代码比较多,就会导致用户第一次访问serv…
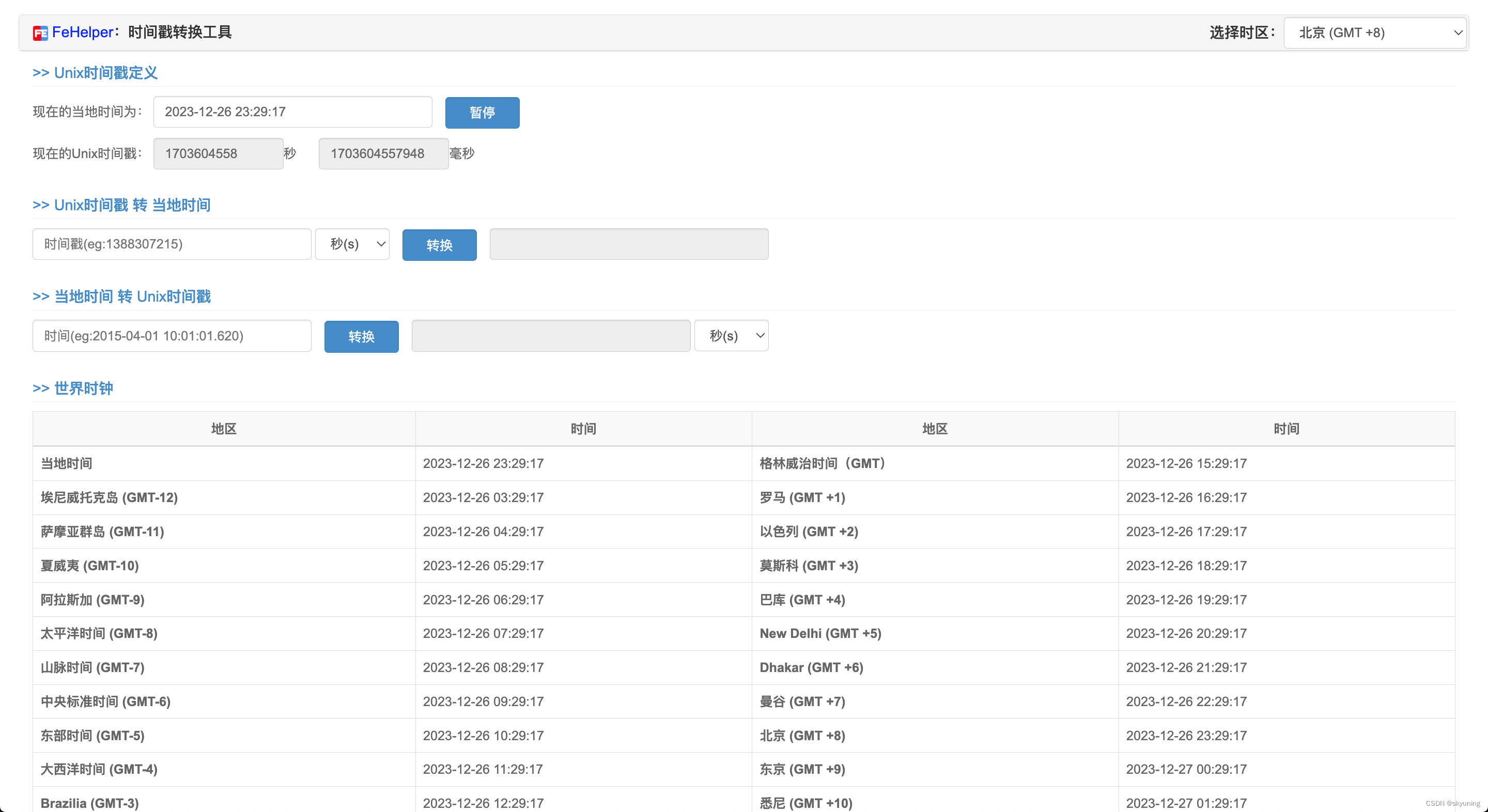
Chrome插件精选 — 前端工具
Chrome实现同一功能的插件往往有多款产品,逐一去安装试用耗时又费力,在此为某一类型插件挑选出比较好用的一款或几款,尽量满足界面精致、功能齐全、设置选项丰富的使用要求,便于节省一个个去尝试的时间和精力。 1. FeHelper(前端助…
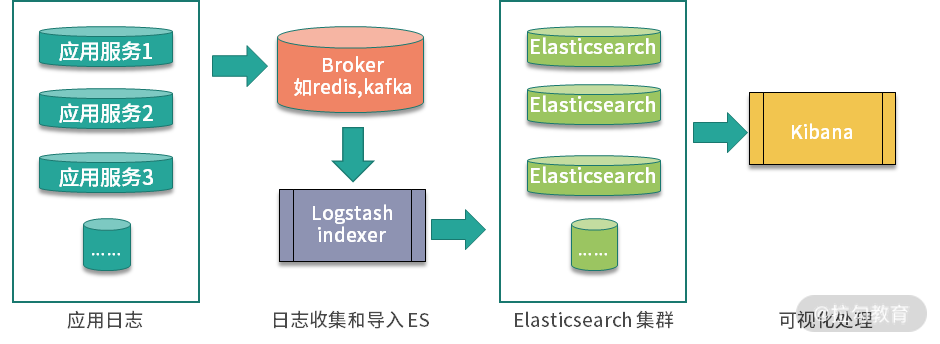
分布式下如何实现统一日志系统?
在业务系统开发中,日志的收集和分析很重要,特别是在进行故障分析时,日志记录得好,可以帮我们快速定位问题原因。在互联网分布式系统下,日志变得越来越分散,数据规模也越来越大,如何更好地收集和…

现代 NLP:详细概述,第 1 部分:transformer
阿比吉特罗伊 一、说明 近五年来,随着 BERT 和 GPT 等思想的引入,我们在自然语言处理领域取得了巨大的成就。在本文中,我们的目标是逐步深入研究改进的细节,并了解它们带来的演变。 二、关注就是你所需要的 2017 年,来…

环保行业的物联网升级:采用钡铼技术R10
随着环境保护意识的增强和可持续发展的迫切需求,物联网技术在环保行业中扮演着越来越重要的角色。为了满足环保监测和数据采集的需求,钡铼技术R10在物联网应用中具有独特的优势。本文将探讨R10的参数和功能,并阐述其在环保行业中的应用前景。…
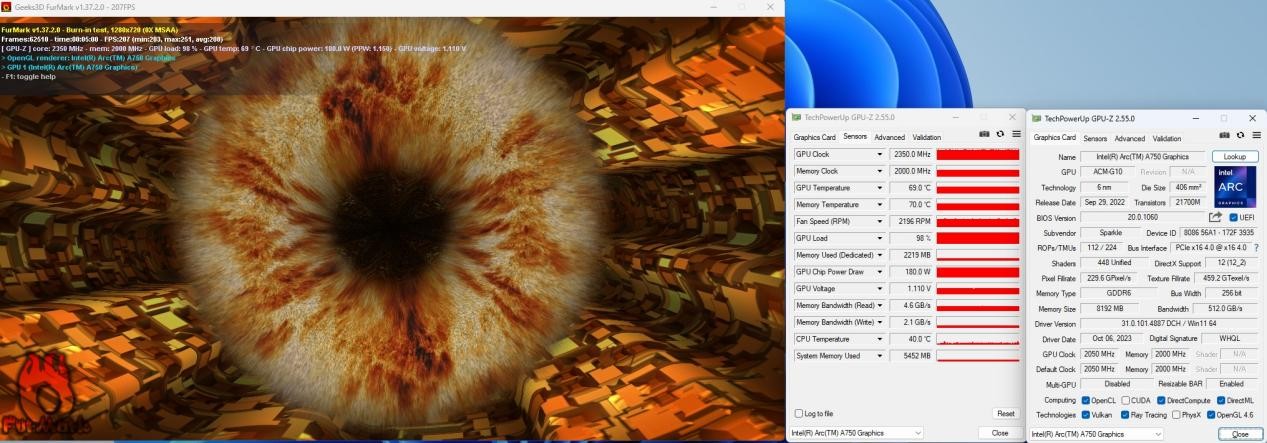
主流级显卡的新选择,Sparkle(撼与科技)Intel Arc A750兽人体验分享
▼前言
对于玩家而言,英特尔独显的出现不仅打破了NVIDIA与AMD双雄天下的局面,而且旗下的Arc A系列显卡还拥有不俗的做工性能以及颇具优势的价格,无论是升级或者是装新机都非常合适。如果要在Arc A系列当中选一个性能不俗,能够满足…
最新文章
- 田忌赛马【洛谷P1650】
- Java-AQS的原理
- 阿里云域名动态解析
- serverLess
- 【鸿蒙开发】后台任务
- IP/网关流量控制:Linux上设置多个路由表 (多号段IP配置)
- UE4 相机围绕某点旋转
- 记一次webshell排查但又无webshell的应急
- 【创建型模式】单例模式
- 适配器模式【结构型模式C++】
- docker安装并跑通QQ机器人实践(4)-bs-cqhttp搭建
- 在redhat7/8平台上部署ELK7.17.18的技术方案
- sudo的设置
- 面向对象设计模式之概念
- 【算法一则】矩阵置零 【矩阵】【空间复用】
- 提升性能:QML Canvas 绘图优化技巧
- Java基本语法(基础部分)
- 小程序变更主体还要重新备案吗?
- springboot中配置类读取配置文件application.properties内容
- 实现ALV页眉页脚
- 直接扩频通信系统的Matlab实现
- 对于地理空间数据,PostGIS扩展如何在PostgreSQL中存储和查询地理信息?
- 翻译《The Old New Thing》 - What‘s so special about the desktop window?
- 常见大厂面试题(SQL)01
- curses --- 终端字符单元显示的处理
- pickle --- Python 对象序列化
- tarfile --- 读写tar归档文件
- # Java NIO(一)FileChannel
- # Memory Analyzer (MAT) 在实际开发中的使用
- # Nacos 服务发现-Spring Cloud Alibaba 综合架构实战(四) -实现 service2 子模块。