map和set的封装
- 1. 红黑树模版的改变
- 1.1 RBTree类模板 头的改变
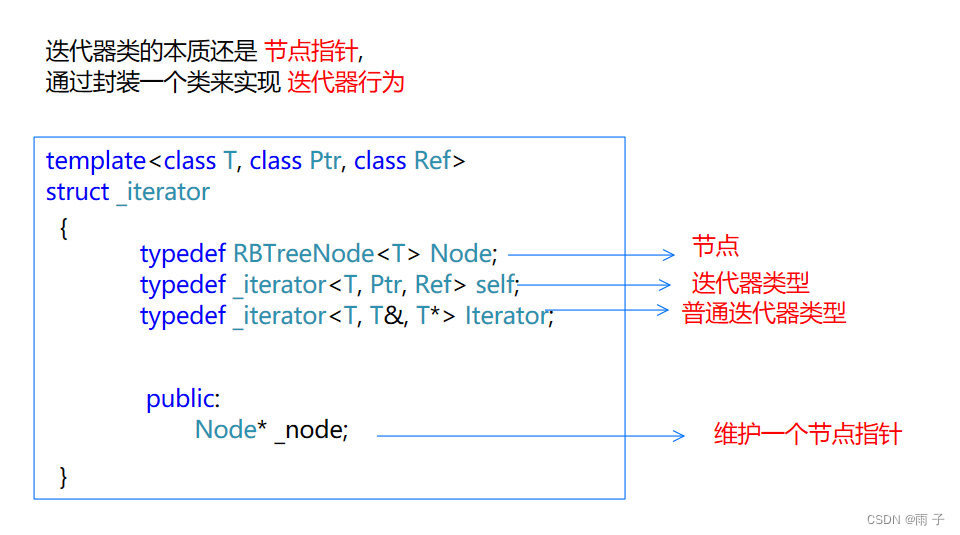
- 1.2 封装迭代器类
- 1.2.1 构造 && 拷贝构造
- 1.2.2. ++
- 1.2.3. - -
- 1.2.4. 其他运算符重载
- 1.3 RBTree类实现普通迭代器和const迭代器
- 2. set的底层逻辑
- 3. map的底层逻辑
- 4. 源码
- 4.1 RBTree类
- 4.2 set类
- 4.3 map类
1. 红黑树模版的改变
1.1 RBTree类模板 头的改变
原来的红黑树模版是 <class K, class V>
由于 set 的存储数据是K类型, 而map的存储数据是 <K, V>类型
⇒ 红黑树的模版要进行改变

🗨️ set中控制 key不允许修改为什么不用 RBTree<K, const K, SetofT>?
-
见set中 普通迭代器 和 const迭代器的实现
1.2 封装迭代器类
1.2.1 构造 && 拷贝构造
- 构造
_iterator(Node* t)
:_node(t)
{}
- 用普通迭代器初始化const迭代器
// 用普通迭代器去初始化const迭代器
_iterator(const Iterator& it)
:_node(it._node)
{}
🗨️为什么要写 用普通迭代器初始化const迭代器呢 ?
-
见set的 insert逻辑
按照道理来说, 迭代器是内置类型 ⇒ 浅拷贝, 是不需要我们亲自写拷贝构造的
1.2.2. ++
++ — — 返回 中序 中的下一个节点
由于 中序是 左跟右 ⇒ 当前节点 ++ 主要有两大情况 右子树为空, 右子树不为空
- 右子树为空, 说明当前根节点的右子树的逻辑并没有结束, 意味着要找到右子树的最小节点
- 右子树为空, 说明当前根节点的整个逻辑已经结束(
左子树向上, 向根节点返回左子树的情况), 意味着要找到最近的孩子是父亲左孩子的父亲节点
self& operator++()
{
// 右子树不为空
if (_node->_right)
{
Node* rightmin = _node->_right;
while (rightmin->_left)
{
rightmin = rightmin->_left;
}
_node = rightmin;
}
// 右子树为空
// 向上回溯并返回最近的孩子是父亲左孩子的父亲节点
else
{
Node* cur = _node;
Node* parent = cur->_parent;
while (parent && cur == parent->_right)
{
cur = parent;
parent = parent->_parent;
}
_node = parent;
}
return *this;
}
1.2.3. - -
减减 — — 加加反过来, 右跟左
当前节点减减, 主要有两大情况 左子树为空, 左子树不问空
- 左子树不为空, 说明当前根结点的左子树逻辑并没有结束, 意味着要找到左子树中的最大节点
- 左子树为空, 说明当前根节点的这个逻辑已经结束(
右子树向上, 向根节点返回右子树的情况), 意味着要找到最近的 孩子是父亲右孩子的父亲节点
self& operator--()
{
// 左子树不为空
if (_node->_left)
{
Node* leftmost = _node->_left;
while (leftmost->_right)
{
leftmost = leftmost->_right;
}
_node = leftmost;
}
// 左子树为空
// 找到最近的孩子是父亲右孩子的父亲节点
else
{
Node* cur = _node;
Node* parent = cur->_parent;
while (parent && parent->_left == cur)
{
cur = parent;
parent = parent->_parent;
}
_node = parent;
}
return *this;
}
1.2.4. 其他运算符重载
- operator!=
bool operator !=(const self& t)
{
return _node != t._node;
}
- operator==
bool operator ==(const self& t)
{
return _node->_data == t._node;
}
- operator*
Ptr operator*()
{
return _node->_data;
}
- operator->
Ref operator->()
{
return &_node->_data;
}
1.3 RBTree类实现普通迭代器和const迭代器
- 类型
typedef _iterator<T, T&, T*> iterator;
typedef _iterator<T, const T&, const T*> const_iterator;
- begin, end
// begin - 最左节点
iterator begin()
{
Node* leftmin = _root;
while (leftmin && leftmin->_left)
{
leftmin = leftmin->_left;
}
// return iterator(leftmin);
return leftmin;
}
iterator end()
{
return iterator(nullptr);
}
const_iterator begin()const
{
Node* leftmin = _root;
while (leftmin && leftmin->_left)
{
leftmin = leftmin->_left;
}
// return const_iterator(leftmin);
return leftmin;
}
const_iterator end()const
{
return const_iterator(nullptr);
}
2. set的底层逻辑
- SetofT
- 底层RBTree类中, 只知道数据类型是
T, 而不知道 set 和 map的具体数据类型 && set的数据类型是K, 而map的数据类型是pair<K, V>⇒ 这个模版T实现了泛型编程
但是有一点是相同的, 都需要数据中的 key 来进行比较逻辑⇒ 我们需要一个函数来提取数据中的key
set中数据类型是K, key的类型也是 K ⇒ 我们 直接返回
struct SetofT
{
const K& operator()(const K& data)
{
return data;
}
};
- 迭代器
typedef typename RBTree<K, K, SetofT>::const_iterator iterator;
typedef typename RBTree<K, K, SetofT>::const_iterator const_iterator;
我们发现 : set中 迭代器 和 const迭代器都是 const迭代器 ⇒ 保证了 key是不能进行修改的
🗨️ set中控制 key不允许修改为什么不用 RBTree<K, const K, SetofT>?
- 如果数据类型直接传
const类型 ⇒ 常量⇒常量, 结构是不成立的
- begin, end
一个const版本即可
iterator begin()const
{
return _t.begin();
}
iterator end()const
{
return _t.end();
}
- find
iterator find(const K& key)
{
return _t.find(key);
}
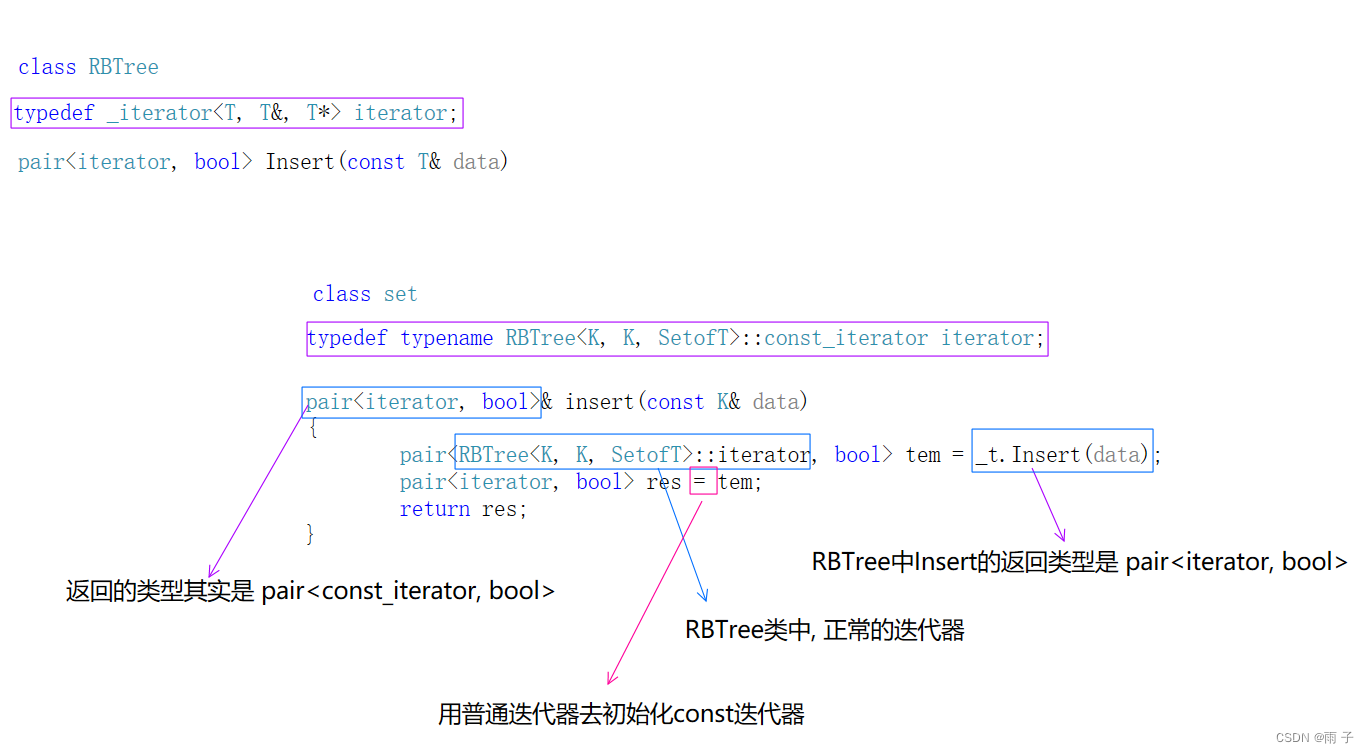
- insert
pair<iterator, bool>& insert(const K& data)
{
pair<RBTree<K, K, SetofT>::iterator, bool> tem = _t.Insert(data);
pair<iterator, bool> res = tem;
return res;
}
- 返回值是 pair结构的原因:
map的[ ] 的本质是调用 insert, 有如下功能: (以 map[ret] 为例子)- ret 在map中存在, 返回value
- ret 在map中不存在, 则新插入该节点
⇒ 这就要求insert 返回的是一个 pair结构, <节点迭代器, 是否存在> ⇒ pair<iterator, bool>
由于 set 和 map 共用同一个 红黑树 ⇒ set中的 insert的返回值也是一个 pair结构
- 进行类型转换的原因
注意: set中的iterator是 const_iterat
而RBTree中 Insert的返回值是 pair<iterator, bool> && RBTre类中的 iterator是正常的, 是普通迭代器
⇒ 就会出现 pair<const_iterator, bool> = pair<iterator, bool> 的类型不匹配问题
由于 普通迭代器是可以初始化const迭代器的 (在RBTree类中的 迭代器类中要多一个 用普通迭代器去初始化const迭代器的函数) ⇒ 所以,我们要先接收一下 Insert的返回值, 然后再进行类型转换
3. map的底层逻辑
- MapofT
struct MapofT
{
const K& operator()(const pair<K, V>& data)
{
return data.first;
}
};
- 迭代器
typedef typename RBTree<K, pair<const K, V>, MapofT>::iterator iterator;
typedef typename RBTree<K, pair<const K, V>, MapofT>::const_iterator const_iterator;
- begin, end
iterator begin()
{
return _t.begin();
}
iterator end()
{
return _t.end();
}
const_iterator begin()const
{
return _t.begin();
}
const_iterator end()const
{
return _t.end();
}
- find
iterator find(const K& key)
{
return _t.find(key);
}
- insert
pair<iterator, bool> insert(const pair<K, V>& data)
{
return _t.Insert(data);
}
- operator[ ]
V& operator[](const K& key)
{
pair<iterator, bool> ret = insert(make_pair(key, V()));
return ret.first->second;
}
4. 源码
4.1 RBTree类
#pragma once
#include<iostream>
#include<assert.h>
using namespace std;
// 枚举
enum Color
{
RED,
BLACK
};
template<class T>
struct RBTreeNode
{
public:
RBTreeNode(const T& data)
:_data(data)
{}
public:
T _data;
Color _color = BLACK;
RBTreeNode<T>* _left = nullptr;
RBTreeNode<T>* _right = nullptr;
RBTreeNode<T>* _parent = nullptr;
};
template<class T, class Ptr, class Ref>
struct _iterator
{
typedef RBTreeNode<T> Node;
typedef _iterator<T, Ptr, Ref> self;
typedef _iterator<T, T&, T*> Iterator;
public:
// 用普通迭代器去初始化const迭代器
_iterator(const Iterator& it)
:_node(it._node)
{}
_iterator(Node* t)
:_node(t)
{}
bool operator !=(const self& t)
{
return _node != t._node;
}
bool operator ==(const self& t)
{
return _node->_data == t._node;
}
Ptr operator*()
{
return _node->_data;
}
Ref operator->()
{
return &_node->_data;
}
self& operator++()
{
if (_node->_right)
{
Node* rightmin = _node->_right;
while (rightmin->_left)
{
rightmin = rightmin->_left;
}
_node = rightmin;
}
else
{
Node* cur = _node;
Node* parent = cur->_parent;
while (parent && cur == parent->_right)
{
cur = parent;
parent = parent->_parent;
}
_node = parent;
}
return *this;
}
self& operator--()
{
if (_node->_left)
{
Node* leftmost = _node->_left;
while (leftmost->_right)
{
leftmost = leftmost->_right;
}
_node = leftmost;
}
else
{
Node* cur = _node;
Node* parent = cur->_parent;
while (parent && parent->_left == cur)
{
cur = parent;
parent = parent->_parent;
}
_node = parent;
}
return *this;
}
public:
Node* _node;
};
template<class K, class T, class KeyofT>
struct RBTree
{
typedef RBTreeNode<T> Node;
public:
typedef _iterator<T, T&, T*> iterator;
typedef _iterator<T, const T&, const T*> const_iterator;
public:
iterator begin()
{
Node* leftmin = _root;
while (leftmin && leftmin->_left)
{
leftmin = leftmin->_left;
}
return leftmin;
}
iterator end()
{
return iterator(nullptr);
}
const_iterator begin()const
{
Node* leftmin = _root;
while (leftmin && leftmin->_left)
{
leftmin = leftmin->_left;
}
return leftmin;
}
const_iterator end()const
{
return const_iterator(nullptr);
}
Node* find(const K& key)
{
KeyofT kot;
Node* cur = _root;
while (cur)
{
if (key > kot(cur->_data))
{
cur = cur->_right;
}
else if (key < kot(cur->_data))
{
cur = cur->_left;
}
else
{
return cur;
}
}
return nullptr;
}
void RotateL(Node* parent)
{
++RotateCount;
Node* cur = parent->_right;
Node* grandfather = parent->_parent;
Node* curleft = cur->_left;
// 旋转核心
parent->_right = curleft;
cur->_left = parent;
// 更新父亲
// 1. parent && curleft
if (curleft)
{
curleft->_parent = parent;
}
parent->_parent = cur;
// 2.更新cur
if (grandfather == nullptr)
{
cur->_parent = nullptr;
_root = cur;
}
else
{
if (grandfather->_left == parent)
{
grandfather->_left = cur;
}
else
{
grandfather->_right = cur;
}
cur->_parent = grandfather;
}
}
void RotateR(Node* parent)
{
++RotateCount;
Node* cur = parent->_left;
Node* grandfather = parent->_parent;
Node* curright = cur->_right;
// 旋转核心
parent->_left = curright;
cur->_right = parent;
// 更新链接关系
// 1. parent && curright
if (curright)
{
curright->_parent = parent;
}
parent->_parent = cur;
// 2.更新cur
if (grandfather == nullptr)
{
cur->_parent = nullptr;
_root = cur;
}
else
{
if (grandfather->_left == parent)
{
grandfather->_left = cur;
}
else
{
grandfather->_right = cur;
}
cur->_parent = grandfather;
}
}
pair<iterator, bool> Insert(const T& data)
{
KeyofT kot;
if (_root == nullptr)
{
// 根节点是黑色的
_root = new Node(data);
_root->_color = BLACK;
return make_pair(iterator(_root), true);
}
Node* parent = _root;
Node* cur = _root;
while (cur)
{
if (kot(data) > kot(cur->_data))
{
parent = cur;
cur = cur->_right;
}
else if (kot(data) < kot(cur->_data))
{
parent = cur;
cur = cur->_left;
}
else
{
return make_pair(iterator(cur), false);
}
}
// 新建一个节点, 默认是红色
cur = new Node(data);
cur->_color = RED;
// 链接cur 和 parent
if (kot(cur->_data) > kot(parent->_data))
{
parent->_right = cur;
}
else
{
parent->_left = cur;
}
cur->_parent = parent;
// 更改黑红比例
while (parent && parent->_color == RED)
{
Node* grandfather = parent->_parent;
if (grandfather->_left == parent)
{
Node* uncle = grandfather->_right;
// u存在且为红
if (uncle && uncle->_color == RED)
{
// 颜色变化
grandfather->_color = RED;
parent->_color = uncle->_color = BLACK;
// 继续向上调整
cur = grandfather;
parent = cur->_parent;
}
else // u不存在 或 u存在且为黑色
{
if (cur == parent->_left)
{
RotateR(grandfather);
grandfather->_color = RED;
parent->_color = BLACK;
}
else
{
RotateL(parent);
RotateR(grandfather);
cur->_color = BLACK;
grandfather->_color = RED;
}
break;
}
}
else if (grandfather->_right == parent)
{
Node* uncle = grandfather->_left;
// u存在且为红
if (uncle && uncle->_color == RED)
{
// 颜色变化
grandfather->_color = RED;
uncle->_color = parent->_color = BLACK;
// 继续向上调整
cur = grandfather;
parent = cur->_parent;
}
// u不存在 或 u存在且为黑色
else
{
if (parent->_right == cur)
{
RotateL(grandfather);
parent->_color = BLACK;
grandfather->_color = RED;
}
else
{
RotateR(parent);
RotateL(grandfather);
cur->_color = BLACK;
grandfather->_color = RED;
}
break;
}
}
else
{
assert("黑红比例失控!");
}
}
// 暴力统一处理根节点的颜色
_root->_color = BLACK;
return make_pair(iterator(cur), true);
}
int Height()
{
return Height(_root);
}
int Height(Node* root)
{
if (root == nullptr)
return 0;
int left = Height(root->_left);
int right = Height(root->_right);
return left > right ? left + 1 : right + 1;
}
bool CheckColour(Node* root, int blacknum, int benchmark)
{
if (root == nullptr)
{
if (blacknum != benchmark)
return false;
return true;
}
if (root->_color == BLACK)
{
++blacknum;
}
if (root->_color == RED && root->_parent && root->_parent->_color == RED)
{
cout << root->_kv.first << "出现连续红色节点" << endl;
return false;
}
return CheckColour(root->_left, blacknum, benchmark)
&& CheckColour(root->_right, blacknum, benchmark);
}
bool IsBalance()
{
return IsBalance(_root);
}
bool IsBalance(Node* root)
{
if (root == nullptr)
return true;
if (root->_color != BLACK)
{
return false;
}
// 基准值
int benchmark = 0;
Node* cur = _root;
while (cur)
{
if (cur->_color == BLACK)
++benchmark;
cur = cur->_left;
}
return CheckColour(root, 0, benchmark);
}
int GetRoateCount()
{
return RotateCount;
}
private:
Node* _root = nullptr;
int RotateCount = 0;
};
4.2 set类
#pragma once
#include"RBTree.h"
namespace muyu
{
template<class K>
class set
{
struct SetofT
{
const K& operator()(const K& data)
{
return data;
}
};
public:
typedef typename RBTree<K, K, SetofT>::const_iterator iterator;
typedef typename RBTree<K, K, SetofT>::const_iterator const_iterator;
public:
pair<iterator, bool>& insert(const K& data)
{
pair<RBTree<K, K, SetofT>::iterator, bool> tem = _t.Insert(data);
pair<iterator, bool> res = tem;
return res;
}
iterator begin()const
{
return _t.begin();
}
iterator end()const
{
return _t.end();
}
iterator find(const K& key)
{
return _t.find(key);
}
private:
RBTree<K, K, SetofT> _t;
};
}
4.3 map类
#pragma once
#include"RBTree.h"
namespace muyu
{
template<class K, class V>
class map
{
struct MapofT
{
const K& operator()(const pair<K, V>& data)
{
return data.first;
}
};
public:
typedef typename RBTree<K, pair<const K, V>, MapofT>::iterator iterator;
typedef typename RBTree<K, pair<const K, V>, MapofT>::const_iterator const_iterator;
public:
pair<iterator, bool> insert(const pair<K, V>& data)
{
return _t.Insert(data);
}
iterator begin()
{
return _t.begin();
}
iterator end()
{
return _t.end();
}
const_iterator begin()const
{
return _t.begin();
}
iterator find(const K& key)
{
return _t.find(key);
}
const_iterator end()const
{
return _t.end();
}
V& operator[](const K& key)
{
pair<iterator, bool> ret = insert(make_pair(key, V()));
return ret.first->second;
}
private:
RBTree<K, pair<const K, V>, MapofT> _t;
};
}
遥望中原,荒烟外、许多城郭。
想当年、花遮柳护,凤楼龙阁。
万岁山前珠翠绕,蓬壶殿里笙歌作。
到而今、铁骑满郊畿,风尘恶。
兵安在?膏锋锷。
民安在?填沟壑。
叹江山如故,千村寥落。
何日请缨提锐旅,一鞭直渡清河洛。
却归来、再续汉阳游,骑黄鹤。
— — 岳飞《满江红·登黄鹤楼有感》