[动态规划] (十四) 简单多状态 LeetCode LCR 091.粉刷房子
文章目录
- [动态规划] (十四) 简单多状态 LeetCode LCR 091.粉刷房子
- 题目解析
- 解题思路
- 状态表示
- 状态转移方程
- 初始化和填表顺序
- 返回值
- 代码实现
- 总结
LCR 091. 粉刷房子
题目解析
(1) 一排房子,共有n个
(2) 染红色、蓝色和绿色,且相邻两个房子颜色不能相同
(3) 不同颜色的价格用cost数组表示,大小为n*3
(4) cost[0] [0],0表示染红色的价格、cost[1] [2], 2表示染绿色的价格,剩下的1则表示染蓝色的价格
(5) 求出最小价格
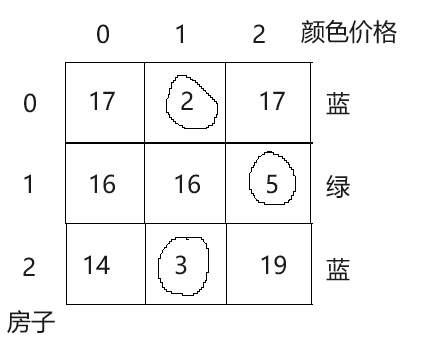
示例1:
解题思路
状态表示
按照以往的经验,我们就取以i为终点,所花费的最小的价格
本题的开始有三种不同的染法,第一个位置可以染红色、蓝色或者绿色。
所以dp[i] [0]:表示第一个位置染红色,到i位置的最小价格
dp[i] [1]:表示第一个位置染蓝色,到i位置的最小价格
dp[i] [2]:表示第一个位置染绿色,到i位置的最小价格
状态转移方程
当我们第i个位置染了红色,那么i-1位置就是取蓝色或者绿色的最小价格
所以dp[i] [0] 为到i-1位置两种颜色的较小值加上对应的i位置染红色的价格
所以,可以得出三个状态转移方程
dp[i][0] = min(dp[i-1][1], dp[i-1][2]) + cost对应i位置染红色的价格
dp[i][1] = min(dp[i-1][0], dp[i-1][2]) + cost对应i位置染蓝色的价格
dp[i][2] = min(dp[i-1][0], dp[i-1][1]) + cost对应i位置染绿色的价格
初始化和填表顺序
- 初始化
我们已经确定了三个初始时分别染红色、蓝色和绿色,填上价格即可。
- 填表顺序
三个位置同时从左到右填即可。
返回值
返回三个染法的最小值即可。
看到这里,我们可以自己尝试实现代码,再来看下面的内容。
代码实现
class Solution {
public:
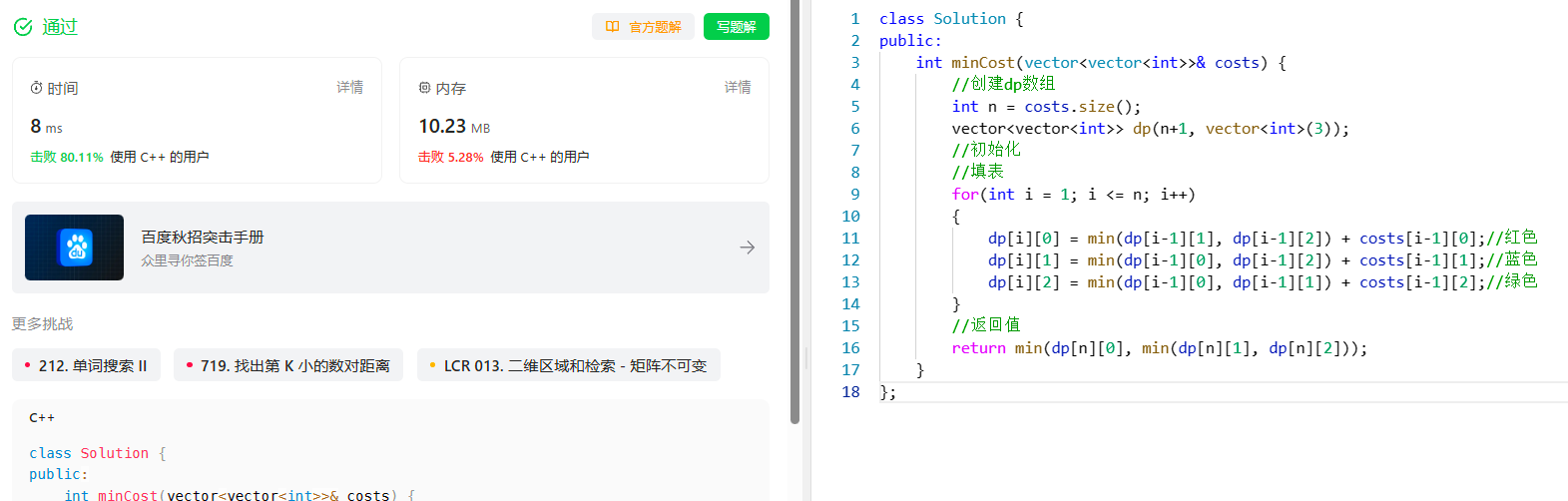
int minCost(vector<vector<int>>& costs) {
//创建dp数组
int n = costs.size();
vector<vector<int>> dp(n+1, vector<int>(3));
//初始化
//填表
for(int i = 1; i <= n; i++)
{
dp[i][0] = min(dp[i-1][1], dp[i-1][2]) + costs[i-1][0];//红色
dp[i][1] = min(dp[i-1][0], dp[i-1][2]) + costs[i-1][1];//蓝色
dp[i][2] = min(dp[i-1][0], dp[i-1][1]) + costs[i-1][2];//绿色
}
//返回值
return min(dp[n][0], min(dp[n][1], dp[n][2]));
}
};
总结
细节1:在填表的过程中,会帮我们一并填上0对应位置的价格,所以我们在循环外边不用手动初始化。
细节2:注意下标之间的对应关系,我们从1开始,但是cost表是从0开始的。
细节3:返回值是三者中的最小值。